

Autonomous mobile double-sided double-arc welding robot system
A welding robot, double-sided double-arc technology, applied in welding equipment, welding accessories, arc welding equipment, etc., can solve the problems of poor comprehensive performance, poor movement flexibility, poor load capacity, etc., to achieve good movement flexibility, strong Good load capacity and overall system performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
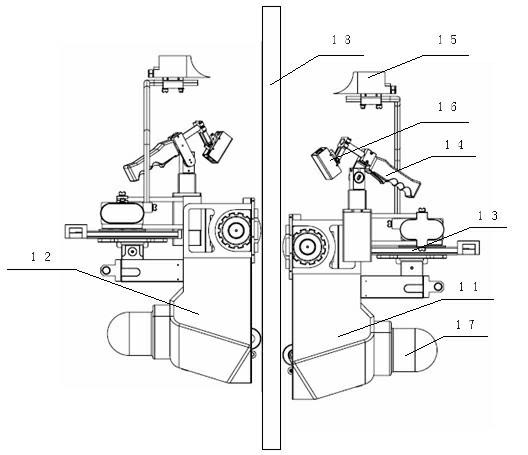
[0052] An autonomous mobile double-sided double-arc welding robot system, including a robot body, a control system and a welding system, is characterized in that:
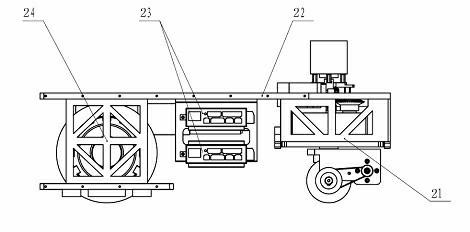
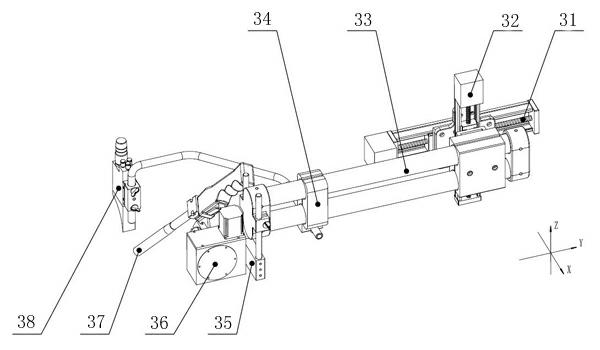
[0053] The robot body includes a crawling mechanism and an operating mechanism: the crawling mechanism includes a front wheel module using a drive-steering integrated magnetic wheel, a rear wheel module using a permanent magnetic gap adsorption device, a frame connecting the front and rear wheels, and a vehicle mounted on the frame. The motor drives the controller, the crawling mechanism is a three-wheel structure, and the three wheels are driving wheels, and the steering on the magnetically conductive wall surface is realized by redundant control steering; the operating mechanism is installed on the crawling mechanism;
[0054] The control system includes a sensing system, a robot body control box and a robot main control system; the sensing system includes a laser tracking sensor, an environment monitoring sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More