

Driving and steering integrated magnetic wheel device for magnetic adsorption wall-climbing robot
A wall-climbing robot and magnetic adsorption technology, used in motor vehicles, transportation and packaging, etc., can solve the problems of large steering resistance, poor steering flexibility, and the driving wheel does not have the ability to adapt to curved surfaces, so as to improve the flexibility of movement and improve the curved surface. The effect of adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
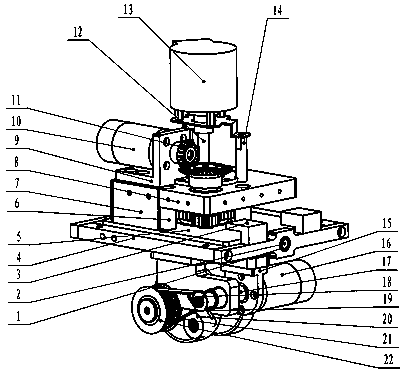
[0030] A drive and steering integrated magnetic wheel device for a magnetic adsorption wall-climbing robot includes a car body fixed frame, a turntable frame, a steering drive mechanism, a wheel drive mechanism and rollers; a Passive roll rotation structure, an independent steering structure is set between the turntable frame and the magnetic wheel; the roll rotation structure includes a roll rotation shaft installed at the front and rear of the turntable frame, and a self-lubricating slide installed on the fixed frame of the car body Bearings; the turntable frame includes a turntable lower support plate, a turntable support column and a turntable cover plate 7 connected in sequence; the steering drive mechanism includes a steering motor mounting plate and a steering drive motor installed thereon, and the steering drive motor adopts a direct current Brushless disc motor, the output shaft of the motor is connected to the planetary gear reducer, and then the steering shaft is dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More