Method for image recognition and vision positioning with robot
An image recognition and visual positioning technology, applied in two-dimensional position/channel control, radio wave measurement system, use of re-radiation and other directions, can solve the problems of low positioning accuracy, insufficient positioning accuracy, slow positioning speed, etc., to eliminate The effect of corner error, large speed and precision tracking range, good sensitivity and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Attached below figure 1 , the specific embodiments of the present invention will be described in detail.
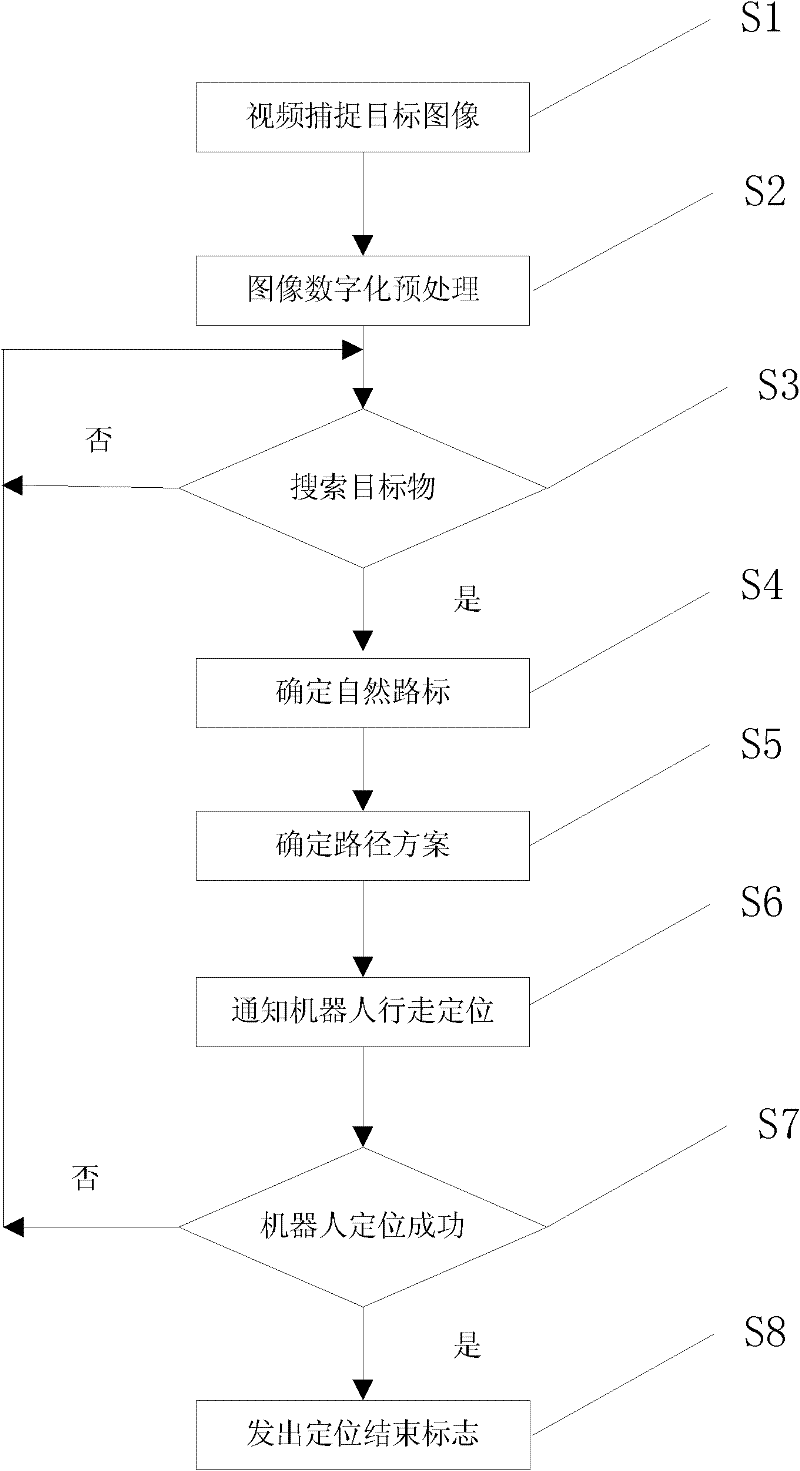
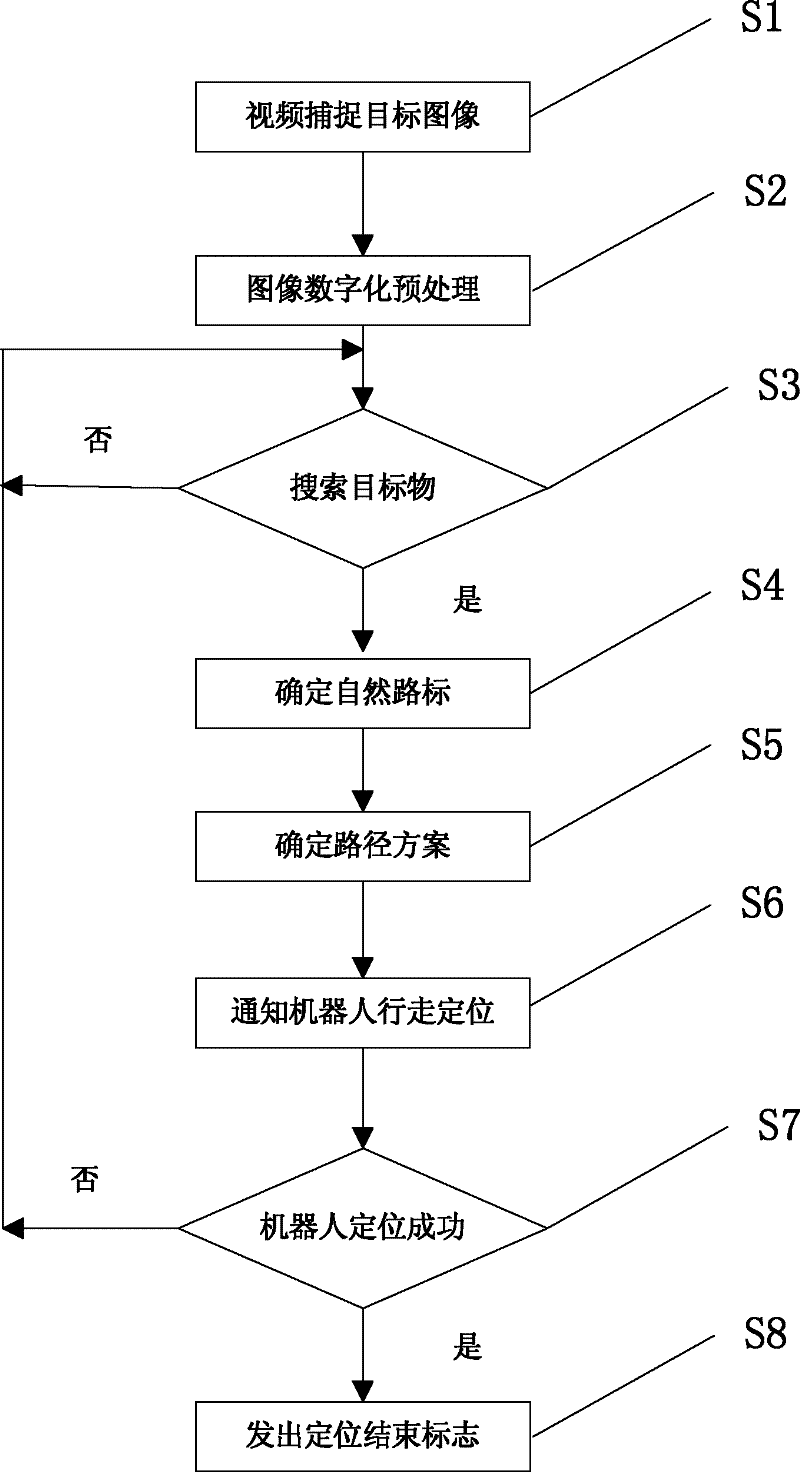
[0023] A method for robot image recognition and visual positioning, comprising the following steps:
[0024] Step S1, video capturing the target image, this step S1 is realized by installing a vision system on the robot, the vision system collects ground information images, including the shape and color image information of the target object, to obtain the target image;
[0025] Step S2, performing digital preprocessing on the target image, specifically, first identifying the boundary and centroid of the object features, and performing digital contour sharpening on the target image to highlight the features of the target image;
[0026] Step S3, searching for the target object, specifically, comparing the collected image information of the target object with the target image, if the two match, the search is successful, otherwise, repeat step 3;
[0027] Step S4, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More