Six degree-of-freedom three-limb parallel robot mechanism
A three-chain, degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of insufficient succinct structure, inability to adapt to high-speed motion, and large mass, and achieve lower quality and better dynamic performance. , the effect of streamlining the organization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0007] The present invention is further described below in conjunction with the embodiments and the accompanying drawings, but the embodiments do not limit the protection scope of the claims of the present application.
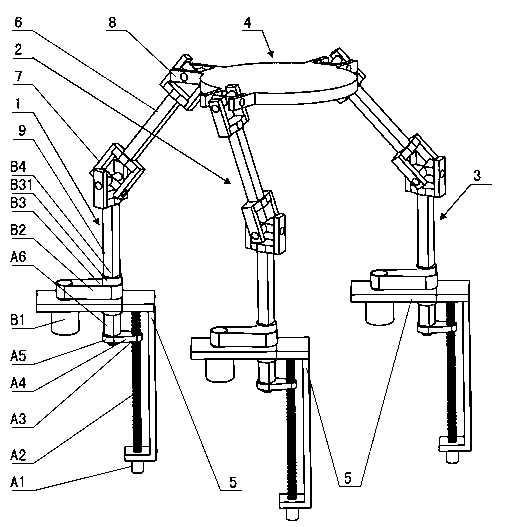
[0008] The six-degree-of-freedom three-branched parallel robot mechanism (referred to as the parallel robot mechanism for short, see figure 1 ) including the moving platform 4 and the base 5 (that is, the static platform) and three moving branches with the same structure connected between the base 5 and the moving platform 4, namely the first moving branch 1 and the second moving branch 2 and the third kinematic branch 3. Each moving branch includes: screw A2, screw pair A3, nut A4, nut rotation pair A5, driving rotation pair B3, moving pair B4, sliding rod 9, a lower hook hinge 7, connecting rod 6 and an upper tiger G hinge 8. The screw pair A3 driven by the first motor A1 fixed on the base 5, the nut rotation pair A5 whose rotation axis is parallel to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More