Space five-FOD (Degree of Freedom) mechanism for independently controlling rotational motion and translational motion
A technology with independent control and degrees of freedom, applied in the field of robotics, can solve the problems of poor rigidity, accumulation of joint errors, and difficulty in control of five-degree-of-freedom series mechanisms, achieving the effects of convenient control, small inertia, and easy solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
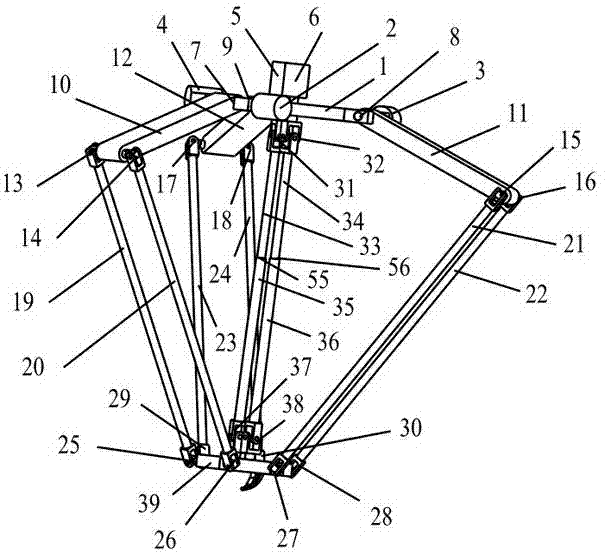
[0025] control figure 1 , figure 2 with image 3 , a five-degree-of-freedom mechanism in space that is independently controlled by rotational and translational motions, including frame 1, the first kinematic branch chain, the second kinematic branch chain, the third kinematic branch chain, the fourth kinematic branch chain, the fifth kinematic branch chain, Translation platform 39 and spherical kinematic chain.
[0026] The first motion branch chain is composed of the first servo motor 2, the first active rod 10, the first connecting rod 19 and the second connecting rod 20. The first servo motor 2 installed on the frame 1 passes through the first rotating pair 7 Drive the first active rod 10 to move, and the first active rod 10 drives the first connecting rod 19 and the second connecting rod 20 through the first Hooke hing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More