

Amphibious robot with deformable foot-web compounded propulsion mechanism
A technology of amphibious and propulsion mechanism, which is applied to amphibious vehicles, motor vehicles, transportation and packaging, etc. It can solve the problems of poor passing capacity and low efficiency, and achieve the effect of easy maintenance and replacement, flexible movement mode and stable stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
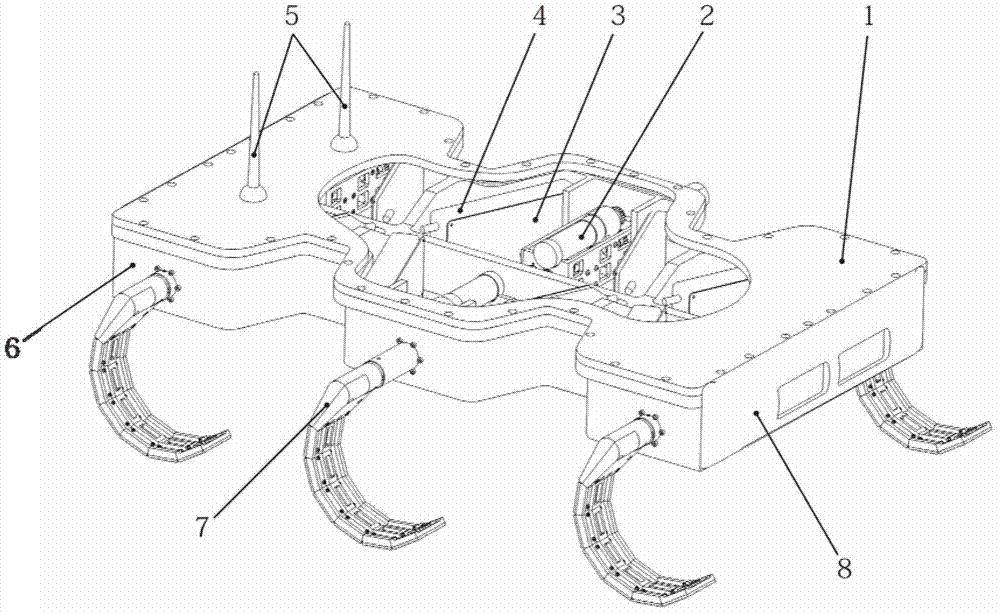
[0028] like figure 1 As shown, the robot of the present invention includes a sealed cover plate 1, a composite propulsion drive module 2, a control circuit 3, a battery 4, a communication antenna 5, a sealed casing 6, a deformable foot-web module 7, and a front / rear cover plate 8, Wherein the joint surface between the sealing cover plate 1 and the sealing shell 6 is sealed by a sealing strip and sealant and then connected by screws, and the front / rear cover plate 8 is bonded to the front and rear sides of the sealing shell 6 respectively, The control circuit 3 and the battery 4 are fixed in the sealed casing 6 by screws, the communication antenna 5 is fixed on the sealed cover 1, and its signal transmission cable is connected with the control circuit 3; a compound propulsion drive module 2, and the output shaft end of each compound propulsion drive module 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More