

Moving method for hybrid-driven jellyfish-simulating amphibious robot
A robot and jellyfish-like technology, applied in the field of robots, can solve the problems of limited driving force, easy to roll over, and the overall structure is not stable enough, and achieve the effects of low manufacturing cost, easy maintenance and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
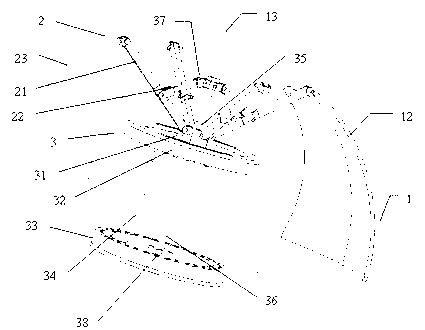
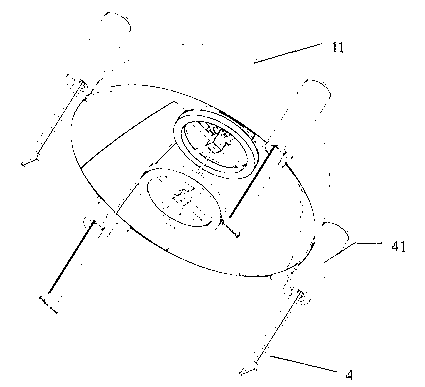
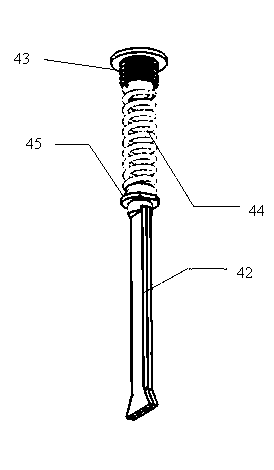
[0042] The following is the umbrella-shaped driving structure of the main body of the imitation jellyfish amphibious robot, which is driven by SMA springs. It is mainly composed of a casing 1, a transmission mechanism 2, a driving mechanism 3, and elastic legs 4. The shell 1 is mainly composed of a flexible hemispherical shell 11, a swing plate 12, and a support rod 13; the transmission mechanism 2 is composed of twelve connecting rods, and the connecting rods are connected by rivets, wherein the connecting rods 23 and the swing plate 12 are fixed even. The drive mechanism 3 is made up of a slider 31 , a first disc 33 , a second disc 32 , an SMA spring set 34 , a return spring 35 , a central rod 36 , a first fixed block 38 , and a second fixed block 37 . Each disc is equipped with a metal ring inside, and the material of the disc is plastic, and two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More