

Four-feet climbing robot
A robot and steering gear technology, applied in the field of robots, can solve the problems of low energy utilization rate and small crawling load, and achieve the effect of saving energy consumption and improving energy utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
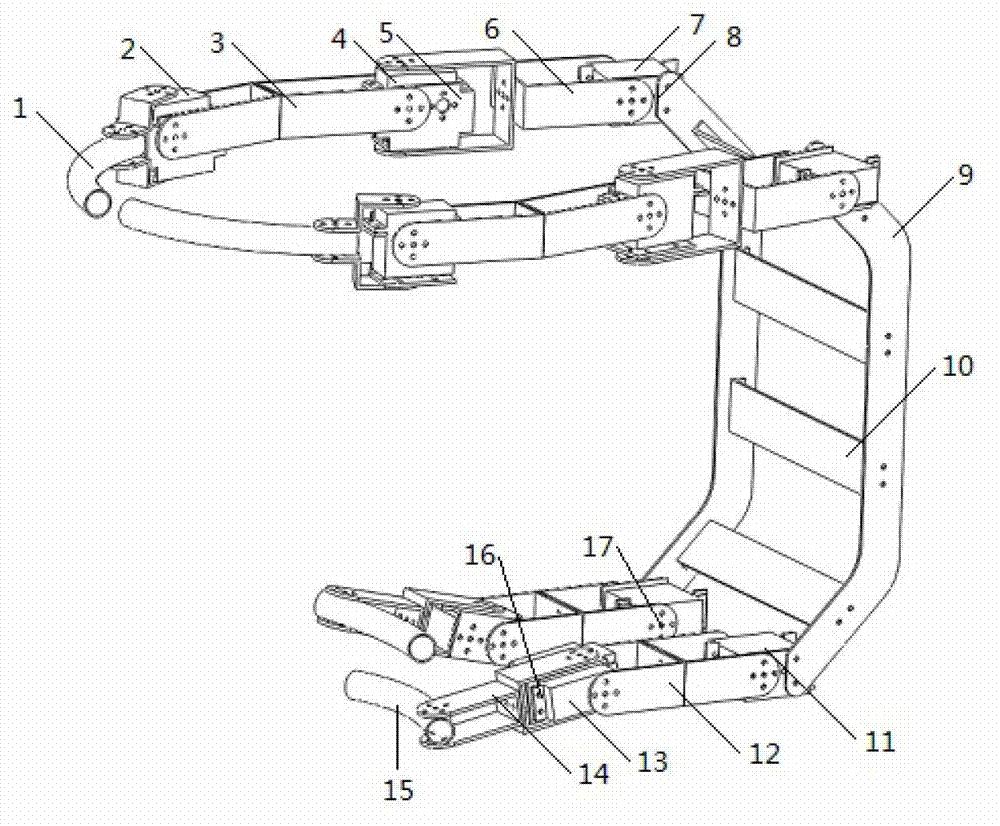
[0031] This embodiment is a quadruped climbing robot. By imitating the body structure of an animal and the way it climbs a tree pole, the structure in which the robot hugs the pole body for climbing is realized. When the climbing robot stands still on the rod body, the fuselage will incline at a certain angle according to the diameter of the rod body, and the hands will hold the rod body, and the feet will climb and push the rod body. There is pressure between the hands and feet and the pole, and when the tilt angle is within the proper range, the pressure creates enough friction to keep the robot balanced on the pole. The robot is self-locked on the rod body under the action of its own gravity to realize the climbing action.
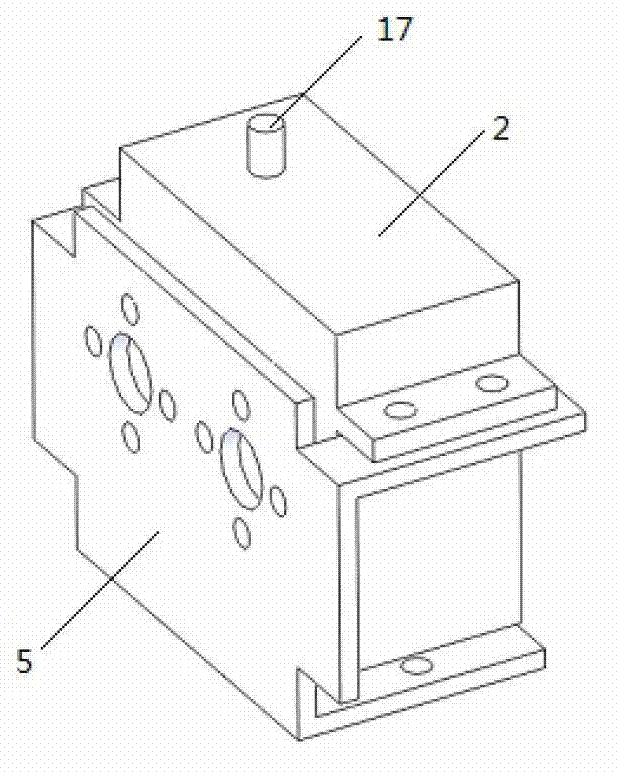
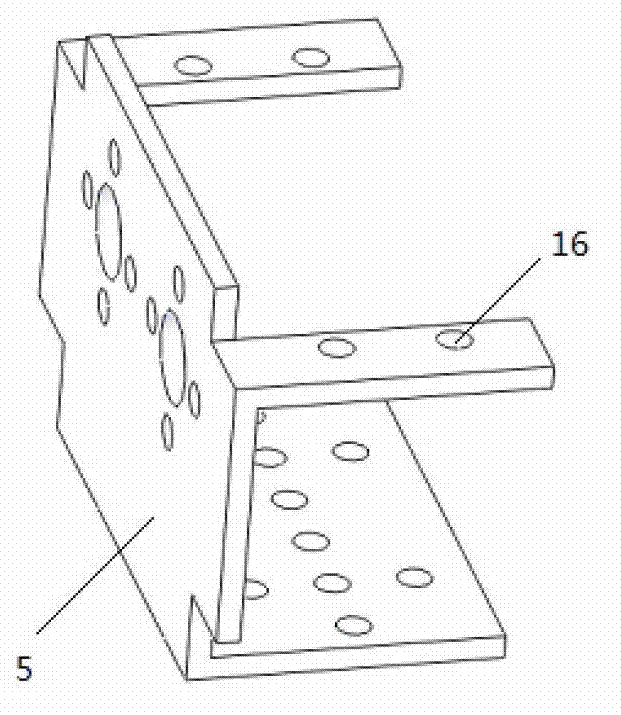
[0032] refer to Figure 1-Figure 11 , the quadruped climbing robot of the present invention includes a hand 1, a wrist steering gear 2, a forearm 3, an elbow steering gear 4, a steering gear cover 5, a rear arm 6, a shoulder steering gear 7, a wedge bl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More