

Brick picking mechanical arm
A technology of manipulator and clamping arm, which is applied in the field of brick picking mechanism, can solve the problems of scattered hanger structure and large frame, and achieve the effects of stable frame, high running speed and simplified mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
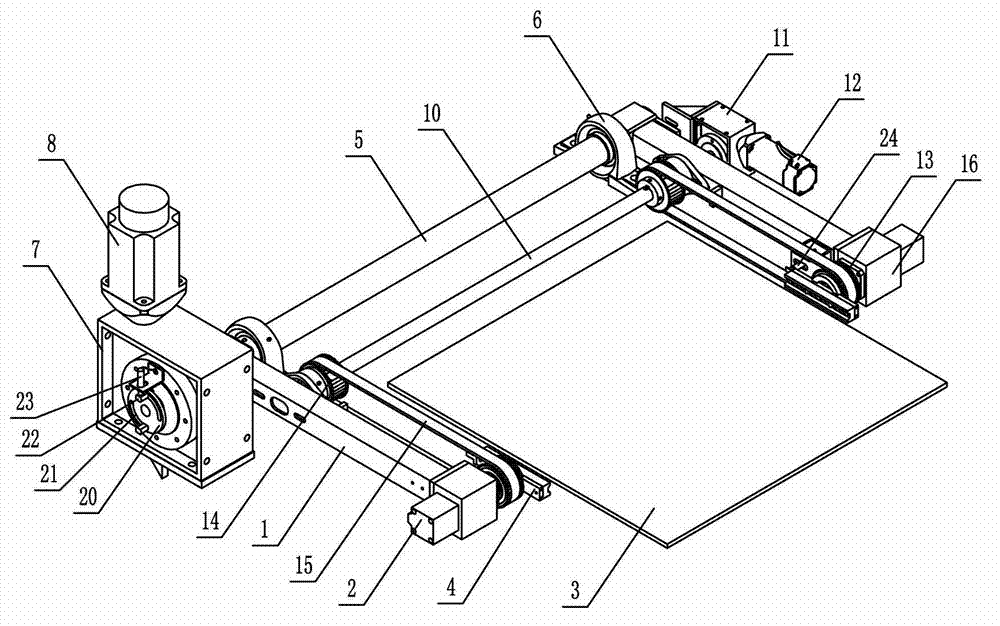
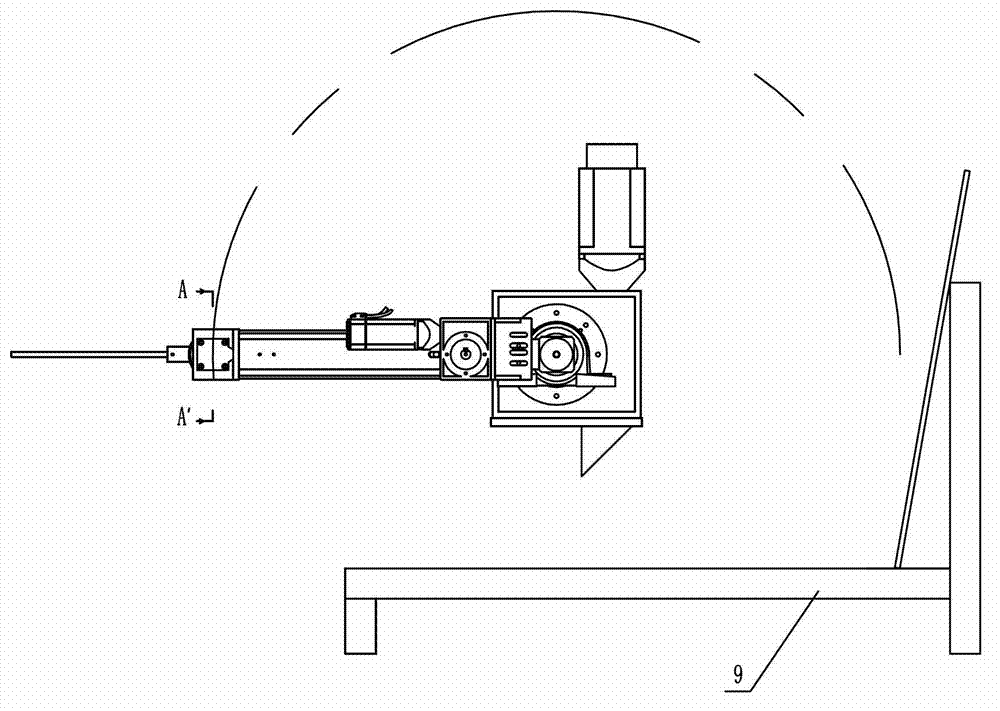
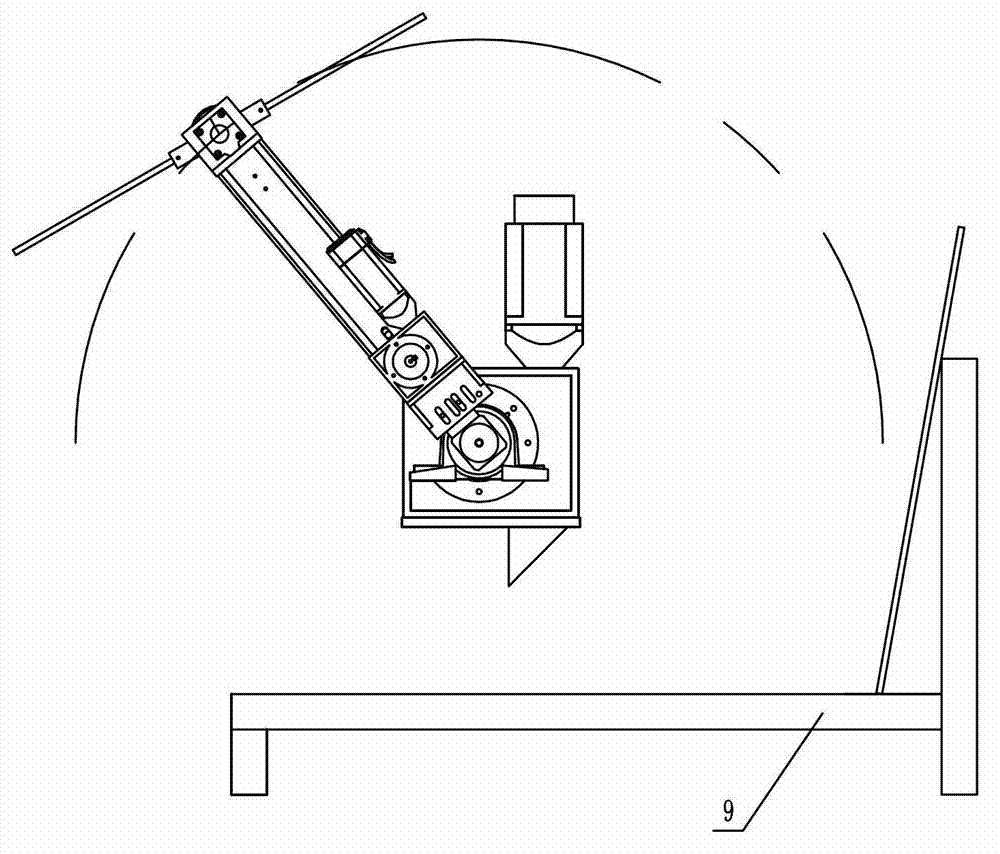
[0015] Such as Figure 1-5 As shown, a brick picking manipulator includes a clamping arm frame composed of a pair of clamping arms 1 and a chuck 4 that is installed on the end of the clamping arm 1 and driven by a cylinder 2 to clamp the two ends of the ceramic tile 3. The clamping arm The other end of 1 is fixed on the first rotating shaft 5, the first rotating shaft 5 is installed on the frame through the bearing seat 6, and the first rotating shaft 5 is driven and connected with a servo motor 8 through a reduction box 7. A rotating device for driving the chuck 4 to rotate is installed on the clamp arm 1 . When starting to pick up bricks, the chucks 4 on both sides are driven by the respective cylinders 2 to clamp the two ends of the ceramic tiles 3, then the servo motor 8 is started, the first rotating shaft 5 is rotated, and the clamp arm frame is placed toward the side where the bracket 9 is placed. One side swings until it swings to the top of the bracket 9. During the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More