

Process module library and programming environment for programming a manipulator process
A technology of manipulator and module library, applied in the direction of program control, program control device, program control manipulator, etc., can solve problems that hinder the industrial application of robots, and achieve the effect of process optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
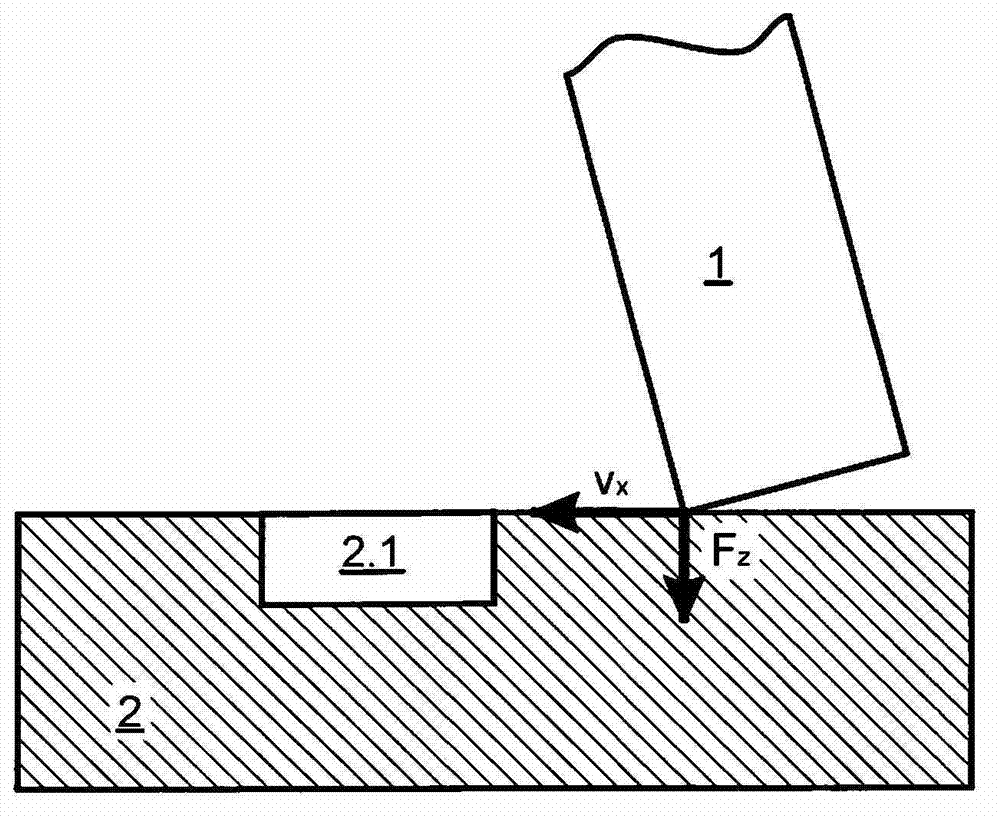
[0061] figure 1 Illustrated is pose-seeking programmed with process modules according to an embodiment of the invention.
[0062] Here, a light robot (not shown) positions the pin 1 in a position-controlled manner in an insertion direction relative to the recess 2.1 to be searched in the surface to be searched of the workpiece 2 (in the figure 1 is placed obliquely on the workpiece 2 at an angle of 15°, and immediately switches to compliant control in at least one Cartesian translation and / or rotational direction upon contact to prevent the workpiece 2 from being damaged.
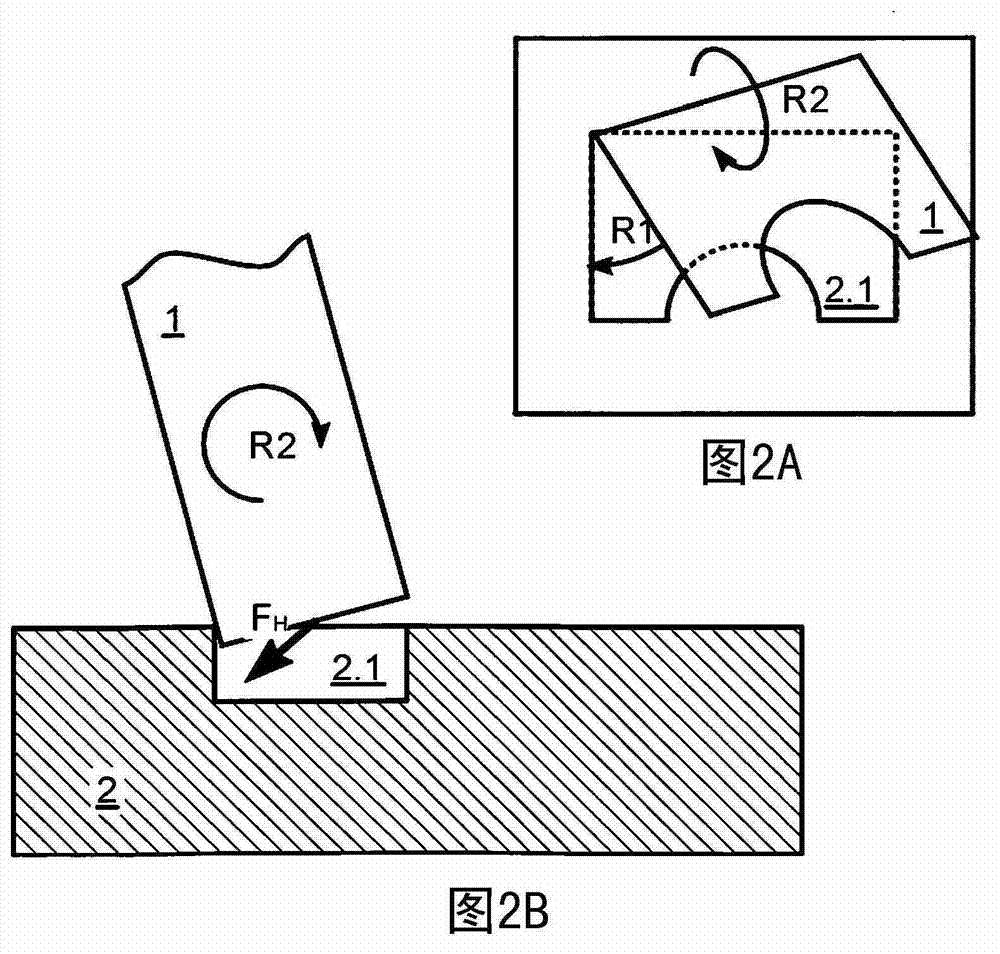
[0063] Now force-controlled or compliant-controlled application of force F perpendicular to the surface to be searched z , in order to clamp the pin 1 in the recess 2.1 when driving over. The pin will be in the search direction V x Proceeding in a compliant manner, wherein the end point of the virtual spring (which is simulated by compliant control between the end point and the pin 1 ) moves in the searc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More