Combined navigation method based on SINS/GPS (strapdown inertial navigation system/global position system)
An integrated navigation and heading angle technology, applied in the field of integrated navigation based on SINS/GPS, can solve the problems of filter divergence, divergence, and inability to obtain navigation parameter estimates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0090] Below in conjunction with example and accompanying drawing, the present invention is described in further detail.
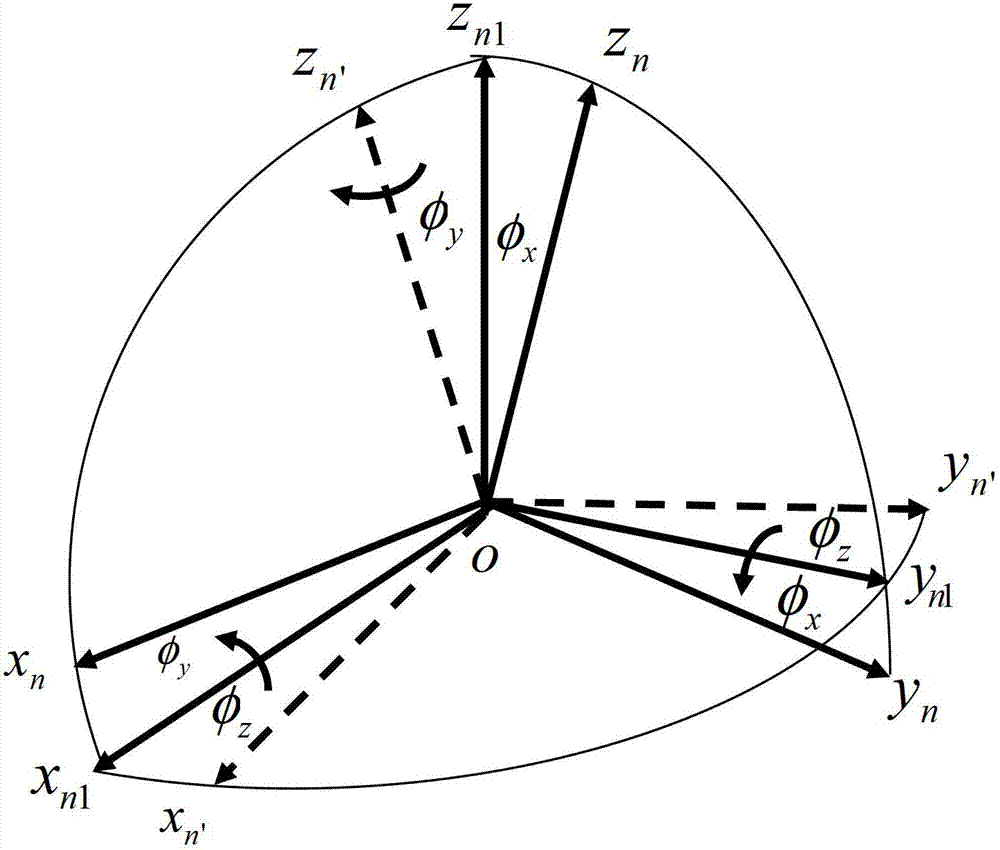
[0091] Coordinates and symbols of this example:
[0092] Coordinate system symbol: ideal navigation coordinate system n, actual navigation coordinate system n′, body coordinate system b Coordinate system selection: select geographic coordinate system (northeast sky) as the navigation coordinate system
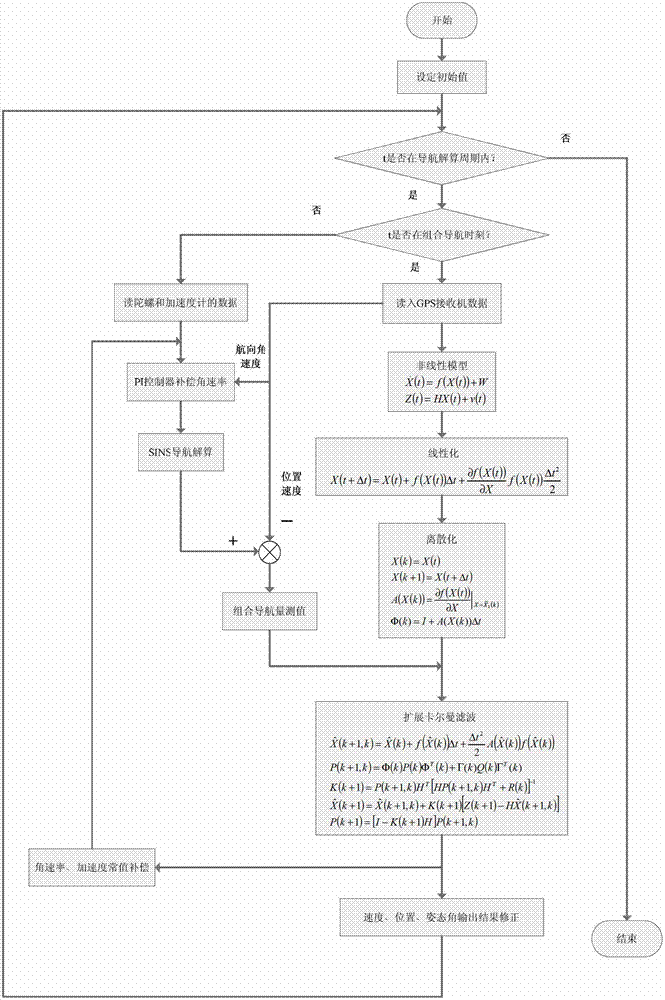
[0093] Step 1: Design a PI (Proportional Integral) controller to compensate the angular rate.
[0094] The attitude matrix of the aircraft (the transformation matrix from the body coordinate system b to the navigation coordinate system n) recorded as
[0095] C b n = C 11 C 12 C ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com