

A walking electric industrial vehicle electric steering control device and method
A technology for electric industrial vehicles and control devices, which is applied in the direction of automatic steering control components, electric steering mechanisms, steering mechanisms, etc., and can solve the problems of steering steering handle offset, high price, and difficulty in balancing the vehicle running in a straight line.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
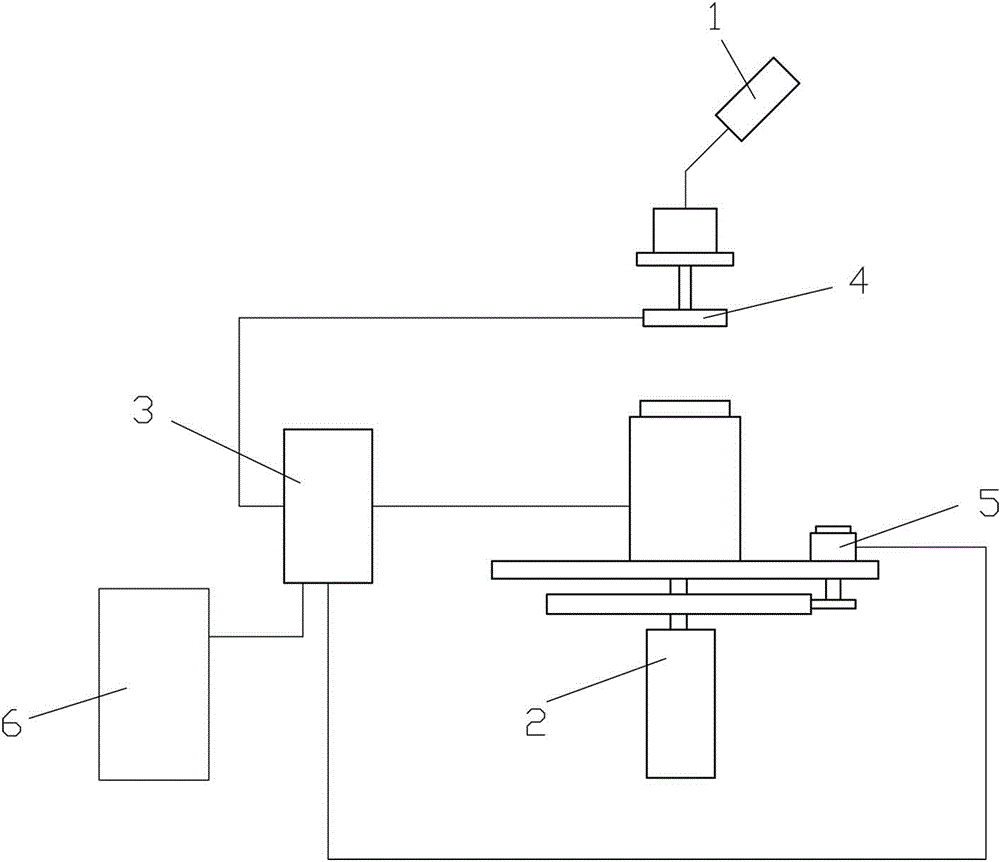
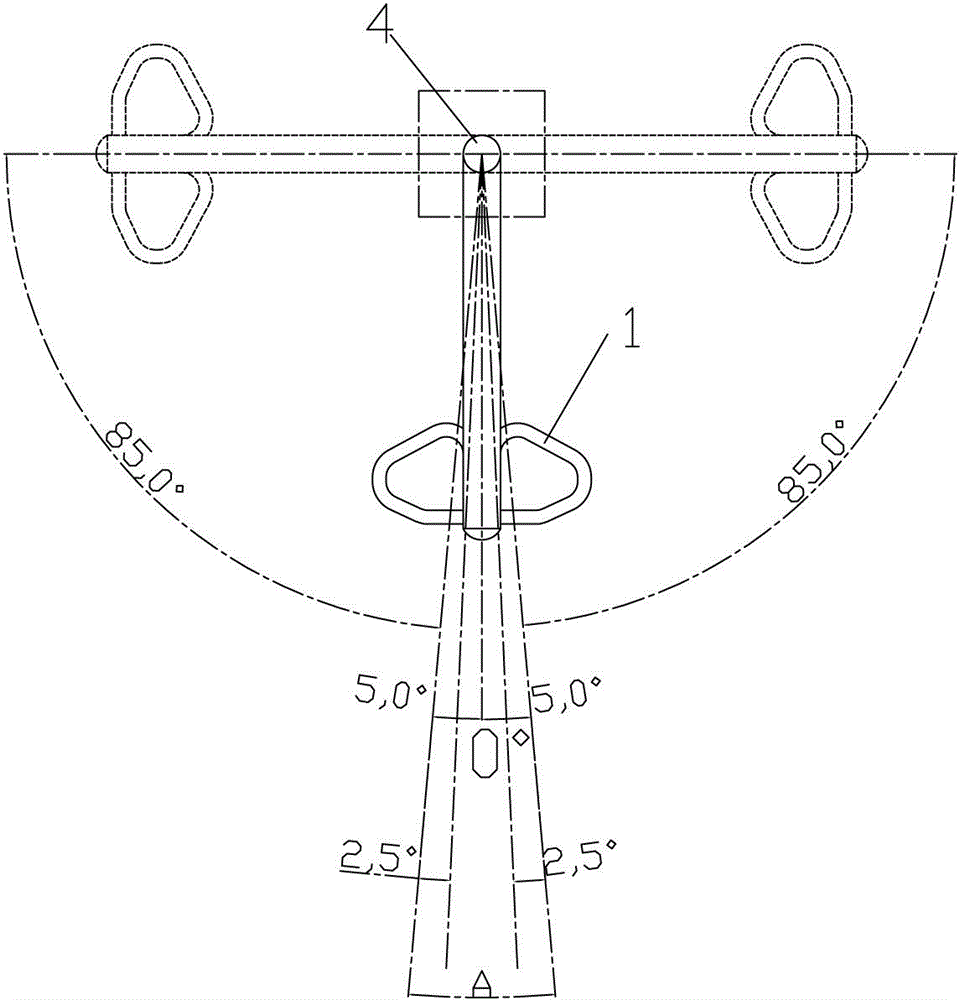
[0033] Embodiment 1, see attached figure 1 , 2, the present invention relates to an electric steering control device for a pedestrian electric industrial vehicle, comprising a steering handle 1, an electric steering component 2 powered by an electric motor, the electric steering component 2 includes a steering motor and a driving wheel, and a steering processor 3 , the steering angle sensor 4 that senses the rotation angle X of the steering handle 1 and the steering execution angle sensor 5 that senses the rotation angle Y of the electric steering component 2; when the operator turns the steering handle 1, The steering angle sensor 4 inputs a rotation angle signal to the steering processor 3, and the electric steering component 2 receives the control signal output by the steering processor 3 and executes the rotation angle Y accordingly, and the Y changes following the X. , X and Y are not marked in the accompanying drawings. The introduction of X and Y is just to make the ex...
Embodiment 2
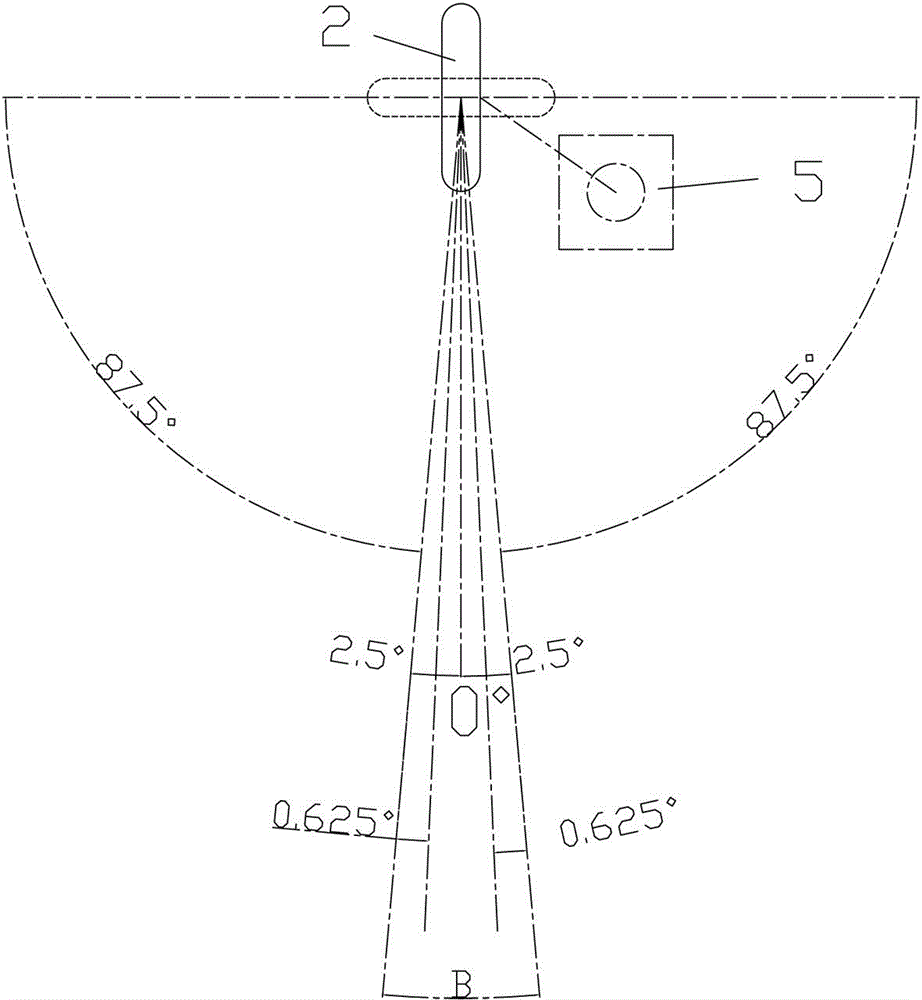
[0042] Embodiment 2, see attached image 3 , the present invention relates to an electric steering control device for a pedestrian electric industrial vehicle, comprising a steering tiller 1, an electric steering component 2 powered by an electric motor, a steering processor 3, and sensing the rotation of the steering tiller 1 The steering angle sensor 4 for the angle X and the steering execution angle sensor 5 for sensing the rotation angle Y of the electric steering component 2; when the operator turns the steering tiller 1, the steering angle sensor 4 will turn The processor 3 inputs the rotation angle signal, and the electric steering component 2 receives the control signal output by the steering processor 3 and executes the rotation angle Y accordingly, and the Y changes with the X, and the value of Y:X is set at Y When Y is within the range B of the correcting angle, it is smaller than when Y is outside the range of the correcting angle. The execution return angle range...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More