

Unit arc length increment interpolation method
An interpolation method and arc length technology, which can be used in electrical program control, digital control, etc., and can solve the problems of inconsistent arc length increments, complicated calculations, and uneven interpolation line speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
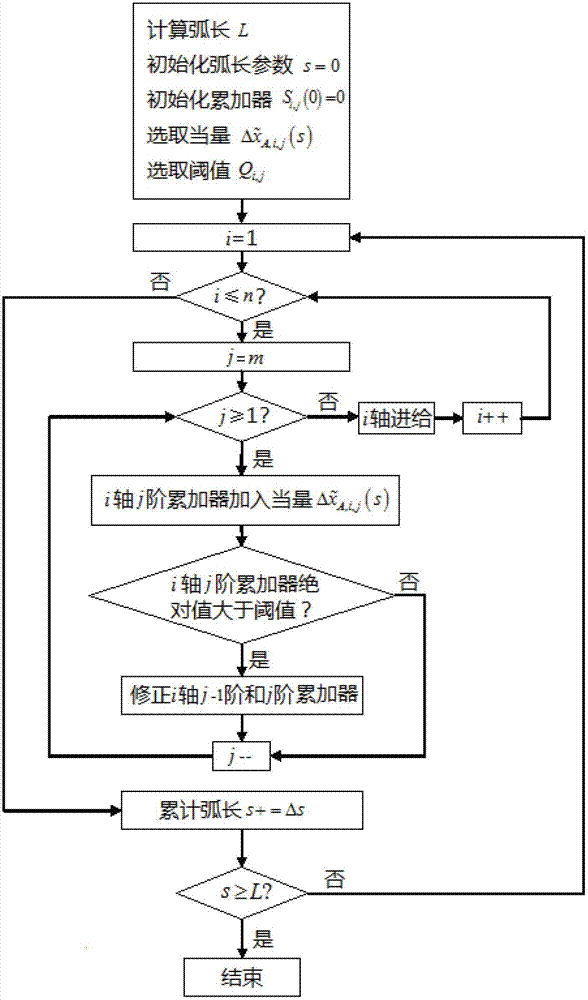
[0094] In this embodiment, the pulse equivalent BLU (generally 10 μm, 1 μm or 0.1 μm) of the motor is used as the unit, that is, Δs=1 BLU. All fundamental parameters are in units of Δs except for the direction k. Adopt the incremental interpolation method of unit arc length of the present invention to interpolate a section of radius R=10 (BLU) along the counterclockwise direction in the plane, the starting angle is 0 °, and the arc of ending angle is 90 °, and the specific steps are as follows ( see figure 1 ):
[0095] Step 1, parameter initialization, including calculating the arc length L of the arc, initializing the arc length parameter s=0, and initializing the accumulator S i,j (0)=0, select the equivalent Select the threshold Q i,j .
[0096] The arc in the present embodiment takes the arc length s as the expression of the parameter:
[0097] r R ( s ) = ...
Embodiment 2
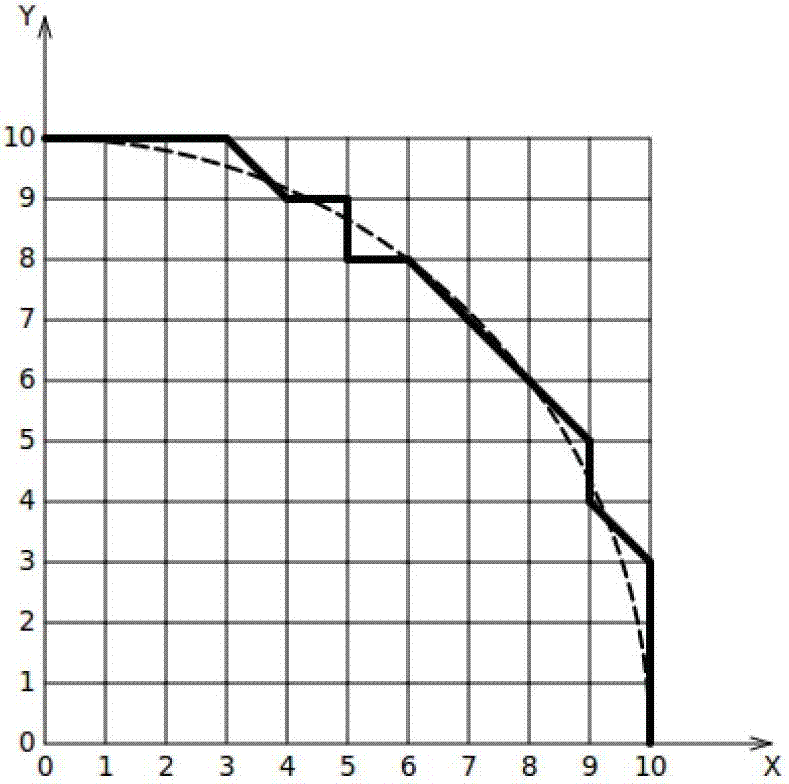
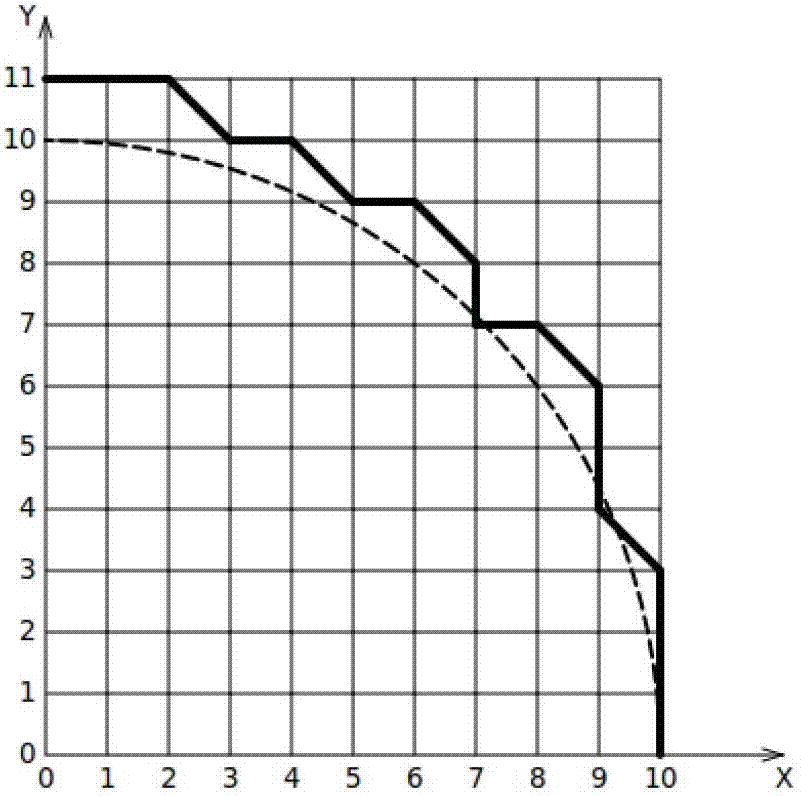
[0126] The unit arc length incremental interpolation method of the present invention can realize synchronous interpolation of multiple multi-axis linkage complex space curves with angle and displacement as independent variables. For example, in a wire cutting machine tool, a group of curves of the upper and lower special-shaped surfaces are interpolated using the unit arc length incremental interpolation method of the present invention. In the machining of upper and lower special-shaped surfaces, when the shapes or lengths of the machining contour curves of the upper and lower planes of the workpiece are inconsistent, it is necessary to perform synchronous interpolation on each segment of the machining contour curves according to their length ratios through multi-axis linkage. In this embodiment, a pair of curves in the upper and lower special-shaped surfaces are interpolated, Figure 4 A schematic diagram of the upper and lower special-shaped ruled surfaces interpolated in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More