

Unmanned aerial vehicle inspection head control method based on visual servo
A power transmission line and visual servo technology, applied in the field of visual servo control, can solve the problems of unmanned helicopter application requirements, no description, etc., and achieve the effects of small investment, improved efficiency, and simple system
Active Publication Date: 2013-02-13
STATE GRID INTELLIGENCE TECH CO LTD
View PDF5 Cites 56 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
This is a severe test for the pilots of manned helicopters. At the same time, the adjustment of the pan / tilt by the ground workstation of the unmanned helicopter is restricted by factors such as time, which cannot meet the application requirements of unmanned helicopters in power inspections. Therefore, how to automatically It is very important to adjust the cloud platform to realize the automatic detection of the transmission line
[0003] Among the existing visual servo-based systems, the visual servo-based precise positioning pan / tilt system for mobile robots proposed by Zhejiang Electric Power Company (Patent No.: ZL 201020685635.7), although it involves the use of visual servo to accurately position the pan / tilt to improve The overall performance of the robot, but this patent is only theoretically analyzed to achieve precise positioning of the pan / tilt through image information, but it does not describe how to achieve the key step of converting image information to the control of the pan / tilt
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
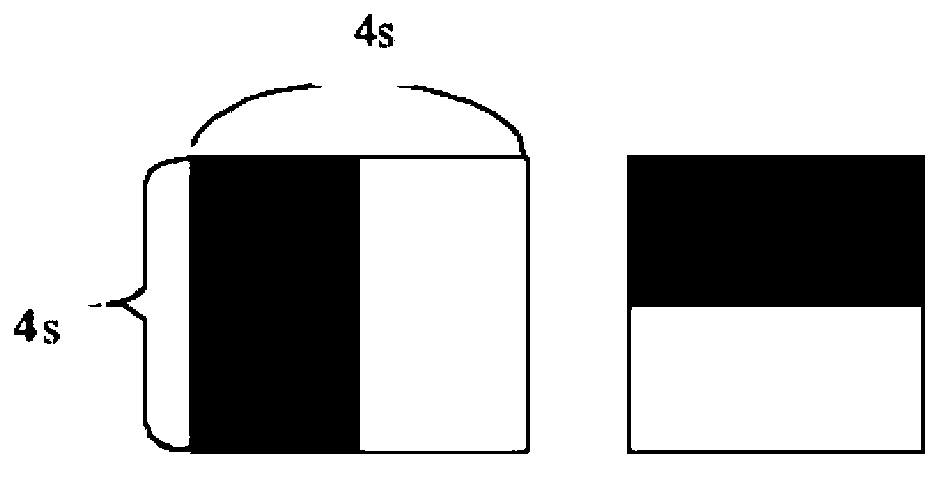
[0092] like Figure 4a and 4b As shown in Fig. 1, the renderings before and after the servo are given after the gimbal rotates to a preset position during the inspection process of the UAV. It can be seen that after the gimbal reaches the preset position, due to the existence of errors, the target is in the The position in the image deviated, and after passing the visual servo, by adjusting the gimbal, the target returned to the image.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
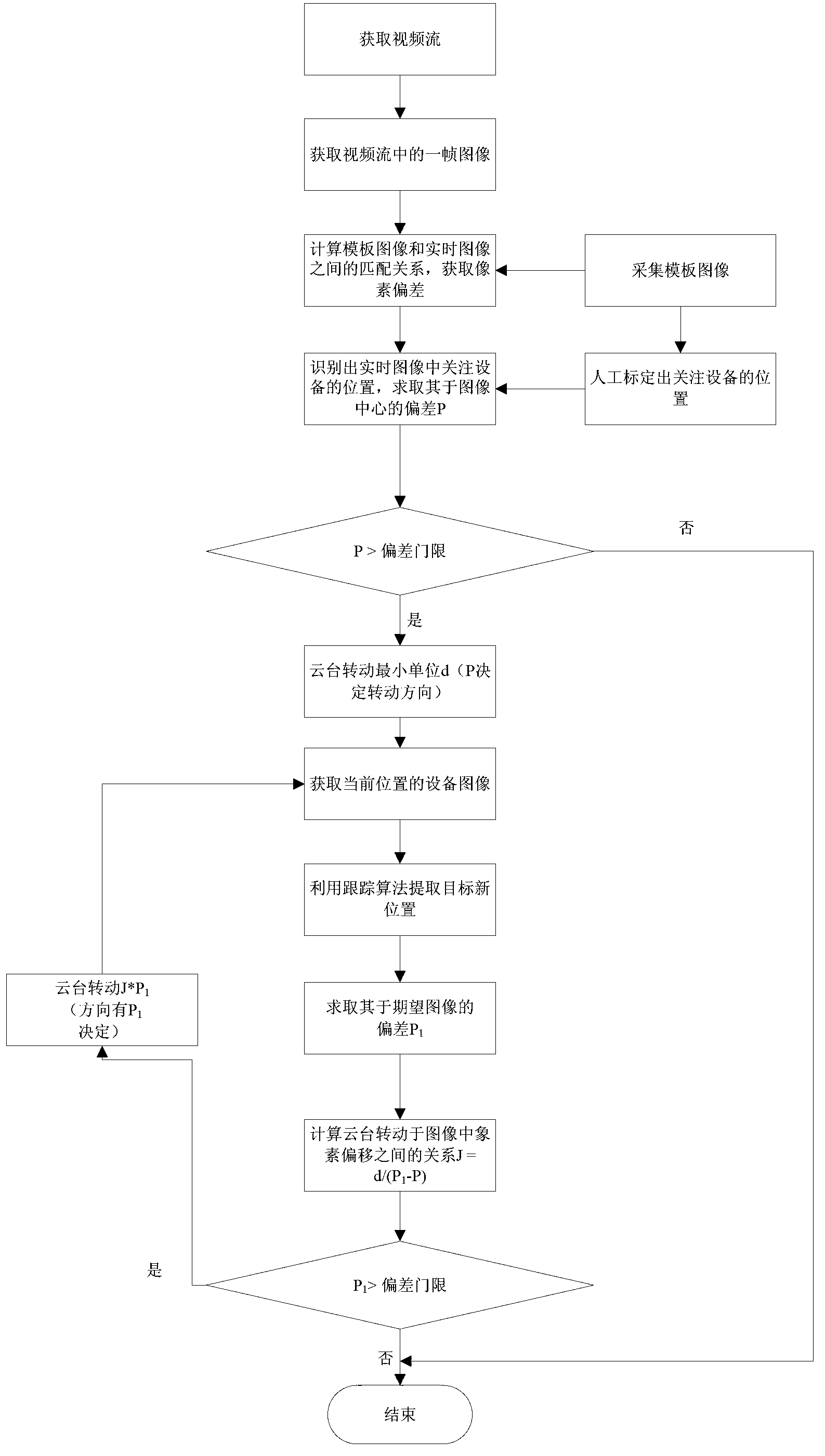
The invention discloses an unmanned aerial vehicle inspection head control method based on visual servo. The method comprises the steps of: 1, obtaining video information by an imaging device; 2, matching a frame real-time image with a template image, obtaining a pixel deviation and determining a deviation P of the image center; 3, judging whether P is greater than a deviation threshold, if not, indicating a normal situation, and finishing this detection, if so, turning to the next step; 4, determining a rotating direction through P, then rotating the holder for the minimal unit d; 5, obtaining the device image at a current position again; 6, trying a new target position by a tracing algorithm; determining the deviation P1 of the new position and the template image; 7, judging whether P is greater than the threshold according to the linear relationship between holder rotation and the pixel deviation in the image, if not, finishing this detection, and if so, returning to the step 5. Location filming of the target in the unmanned aerial vehicle inspection process is effectively solved, and the inspection efficiency and quality are improved.
Description
technical field [0001] The invention relates to a visual servo control method, in particular to a visual servo-based control method for a transmission line UAV inspection platform. Background technique [0002] In the process of traditional manned or unmanned helicopter inspection of power transmission lines and high-voltage towers, it is necessary to manually control the pan / tilt or pod equipped with detection equipment, which requires the inspection personnel to observe the video with a high degree of concentration and timely Adjust the pan / tilt or pod so that the detection target (that is, the power transmission line) can be within the viewing angle of the detection equipment. This is a severe test for the pilots of manned helicopters. At the same time, the adjustment of the pan / tilt by the ground workstation of the unmanned helicopter is restricted by factors such as time, which cannot meet the application requirements of unmanned helicopters in power inspections. Theref...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05D3/00G06K9/46G06K9/40G06T7/00
Inventor王滨海王万国李丽王振利张晶晶王骞刘俍张嘉峰
OwnerSTATE GRID INTELLIGENCE TECH CO LTD