

Arrangement structure for mechanical arm of minimally invasive surgery robot
A technology of minimally invasive surgery and structure arrangement, applied in the field of minimally invasive surgery medical equipment, can solve the problems of large occupied space and complicated adjustment, and achieve the effects of saving space, reducing overall volume and improving utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The arrangement of the mechanical arm of the minimally invasive surgery robot of the present invention will be described in detail below in conjunction with specific embodiments.
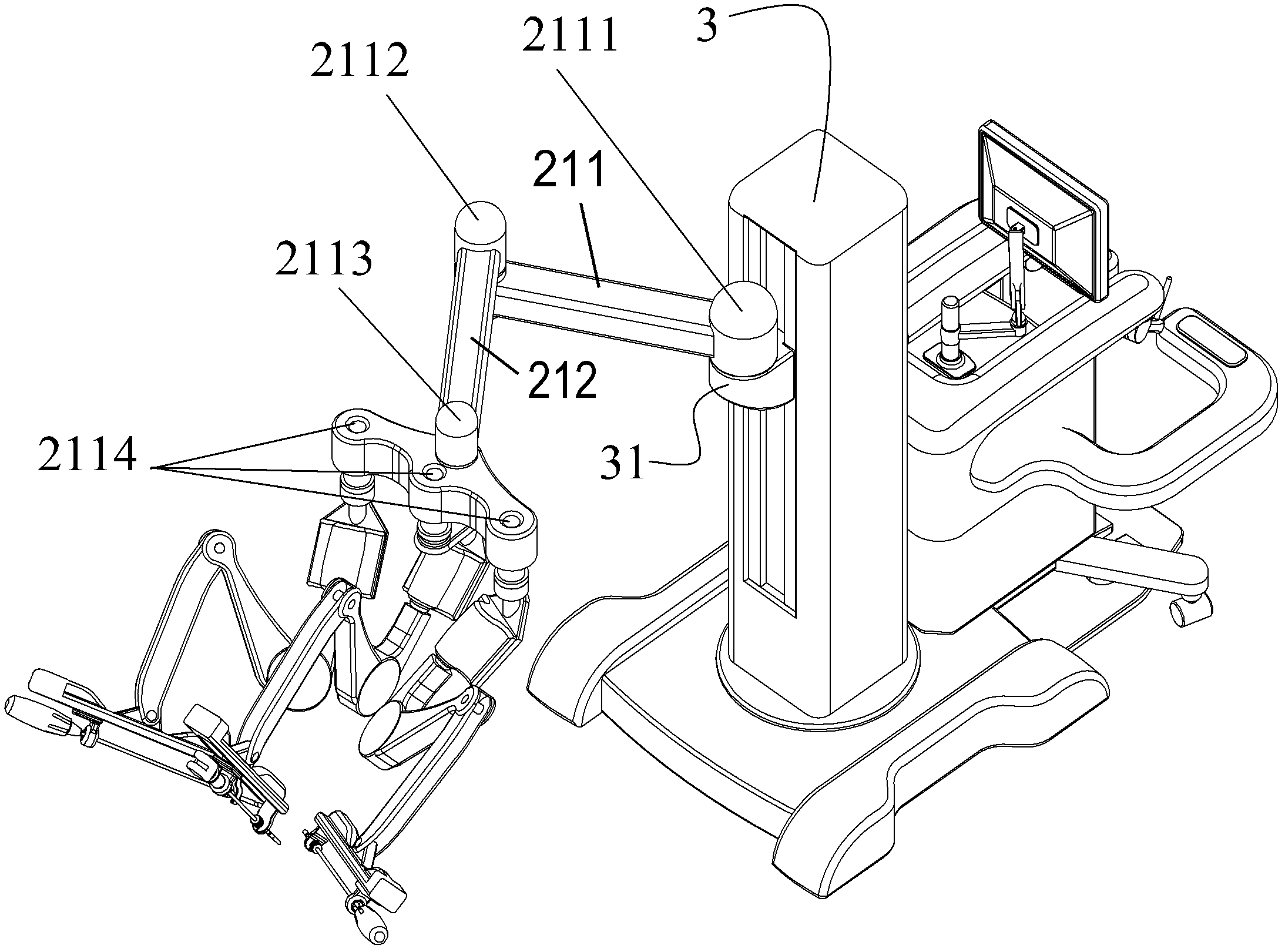
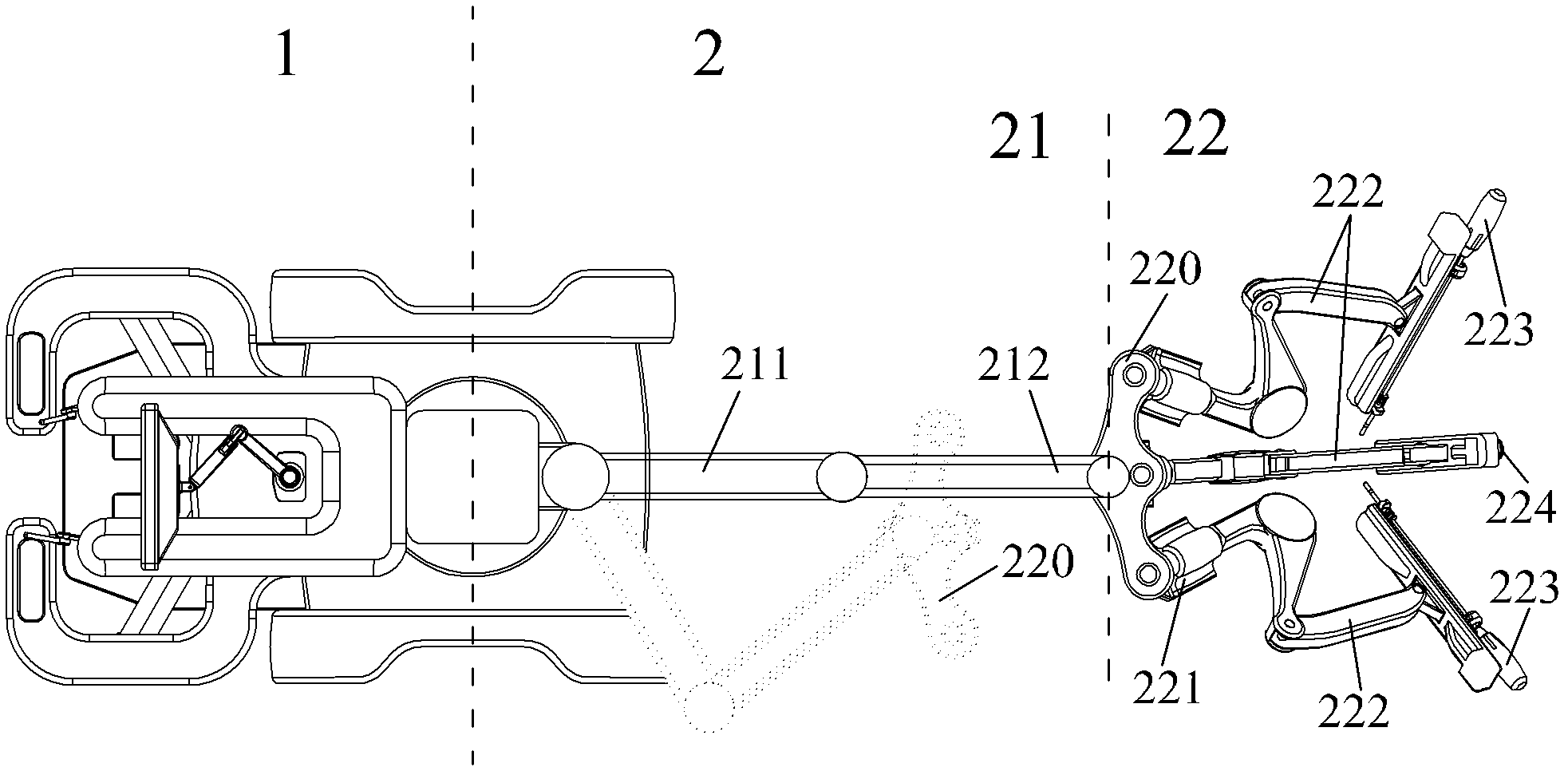
[0052] figure 1 , figure 2 It is an overall schematic diagram of the layout of the novel minimally invasive robotic arm of the present invention. It consists of a column 3, a master operating end part 1 and a slave operating end part 2 installed on the column 3.
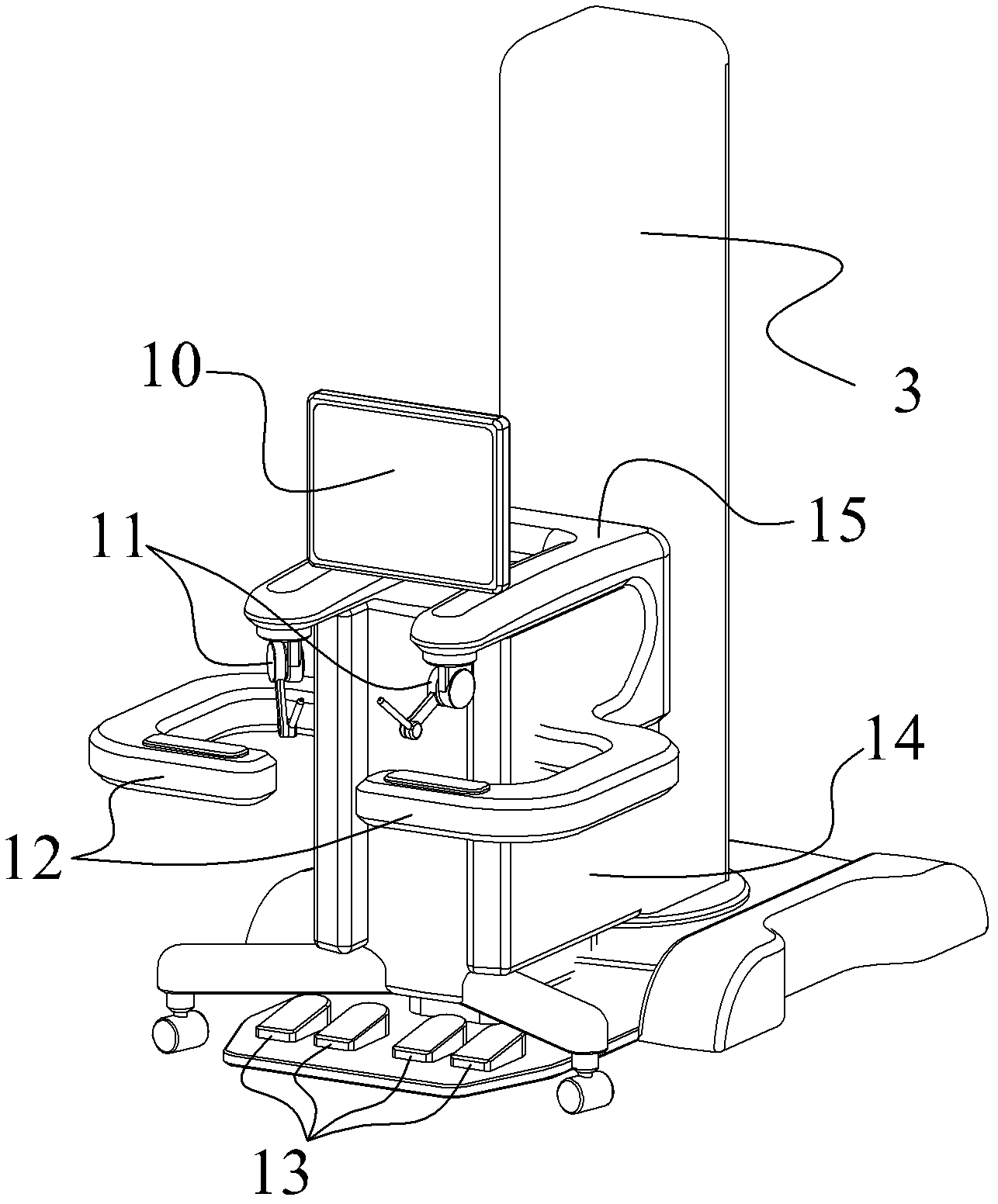
[0053] The composition of the main operation terminal part 1 is shown as image 3 As shown, it provides a surgical operation platform for the doctor. The main operating end part 1 includes a main operating console 15 fixedly installed on the back of the column 3, a monitor 10 installed on the top of the main operating console 15 and a monitor 10 installed on the front of the main operating console 15. Two sets of master operators 11. The surgeon can operate the master operating hand 11 according to the operation scene informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More