

Wheel foot amphibious robot mechanism based on differential wheel eccentric mechanism
An eccentric mechanism and robot technology, which is applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems that amphibious activities cannot be guaranteed at the same time, performance speed, mobility, and terrain adaptability are poor, and achieve rich movement forms. The effect of improving environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
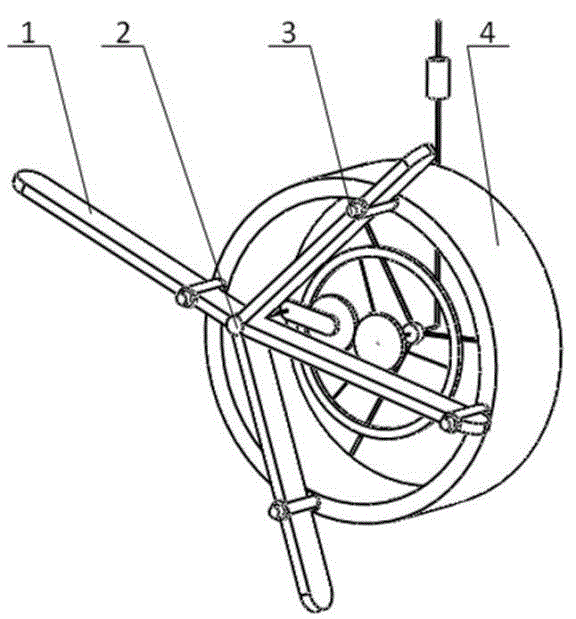
[0029] see Figure 1~5 , the wheel-foot amphibious robot mechanism based on the eccentric mechanism of the differential wheel, including the blade (1), the paddle shaft (2), the hinge (3), the outer wheel shell (4), the frame (5), the motor (18, 17, 15), differential gear train and transmission mechanism, characterized in that: the paddle (1) slides through the hinge (3) and is fixed on the paddle shaft (2), and the hinge (3) is evenly distributed in the circumferential direction On the outer wheel housing (4), the motor (18, 17, 15) respectively drive the outer wheel housing (4) and the differential gear train through the transmission mechanism; the outer wheel housing (4) and the motor (18,17,15) are all installed on the described frame (5).
Embodiment 2
[0031] This embodiment is basically the same as Embodiment 1, and the special features are:
[0032] The wheel-foot amphibious robot mechanism based on the differential wheel eccentric mechanism is characterized in that after the paddle (1) passes through the hinge (3), the inner end is fixed on the paddle shaft ( 2) on.
[0033] The wheel-foot amphibious robot mechanism based on the differential wheel eccentric mechanism is characterized in that the paddle shaft (2) is fixed on a turntable (22) coaxial with the planetary gear (9) in the differential gear train .
[0034] The wheel-foot amphibious robot mechanism based on the differential wheel eccentric mechanism is characterized in that the transmission mechanism includes first and second bevel gears (19, 13), first, second and third transmission gears (6, 7, 11), internal gear (12), planetary gear (9), sun gear (8), sun gear (10), the connection method is:
[0035] a. The motor described (18) Drive the internal gea...
Embodiment 3
[0040] The structure of the wheel-footed amphibious robot based on the differential wheel eccentric mechanism is as follows:
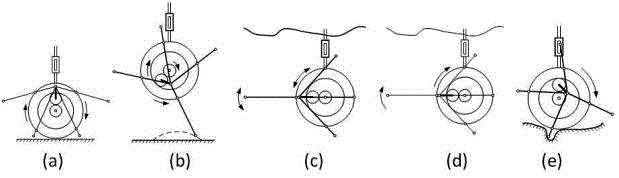
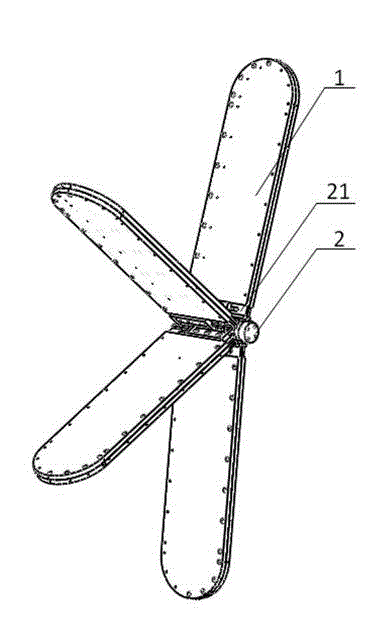
[0041] Such as figure 2 As shown, the four blades (1) are respectively fixed on the paddle shaft (2) through four hinges (3), and the position of the paddle shaft (2) is adjusted through the rotation of the differential gear train, and the outer wheel housing (4 ) can move independently. In this way, the above-mentioned several motion modes can be realized through the coordinated motion of the paddle shaft (2) and the outer wheel housing (4).
[0042] Among them, the paddle (1) is connected with the paddle shaft (2) through the paddle connection block (21), see image 3 ; The four hinges (3) are evenly distributed in the outer wheel shell (4), see Figure 6 ; The paddle shaft (2) is fixed on a turntable (22) coaxial with the planetary gear (9) in the differential gear train, see Figure 4 ; The outer wheel housing (4), the motor mounting plate (14...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More