

High-precision peristaltic pipeline crawl device and control method thereof
A technology of a pipeline crawler and a control method, which is applied in the direction of pipe components, pipes/pipe joints/pipes, mechanical equipment, etc., can solve the problems of poor adaptability, difficulty in adapting to pipes of different diameters, low depth accuracy of crawler, etc., to achieve dynamic wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with specific embodiments.
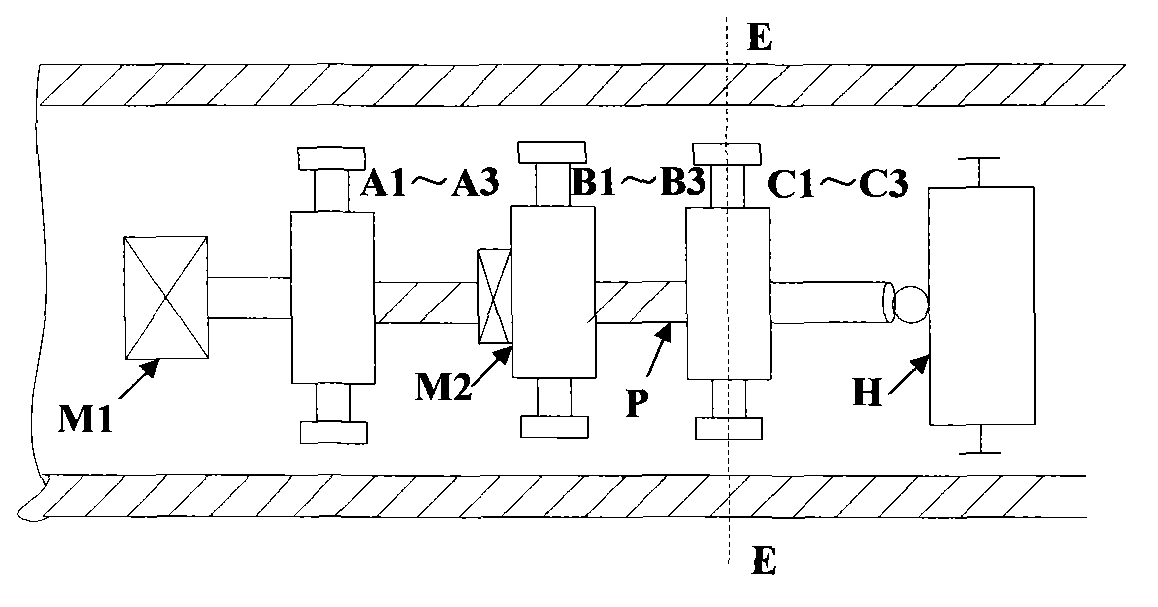
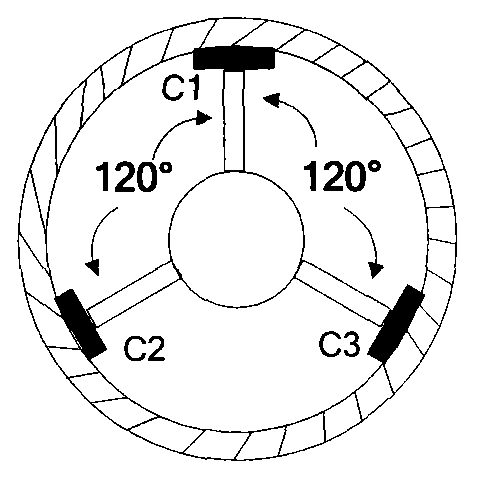
[0021] refer to figure 1 and figure 2 , The peristaltic pipeline crawler includes three three-claw mechanisms, a screw P and a pipeline parameter measuring head H; the motor M1 drives the screw P to rotate, and the motor M2 drives the claws B1 to B3 to expand and contract. The screw P is the torso of the crawler, and it is universally rigidly connected with the pipe parameter measuring head H. The claws A1~A3, B1~B3, and C1~C3 are radially distributed symmetrically. Telescopic three-jaw mechanism. The connection modes between each three-jaw mechanism and the screw rod are different. The three-claw mechanism formed by claws B1~B3 is threadedly connected with the screw P, the three-claw mechanism formed by claws A1~A3, C1~C3 is connected with the screw P by rollers, and the claws A1~claw The three-claw mechanism formed by A3 and claws C1 to C3 cannot be relatively disp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More