

Muscle driving simulation robot joint
A technology of robot joints and muscles, applied in the field of imitated muscle-driven robot joints, can solve the problems of low positioning accuracy, large driving force, easy to generate vibration, etc., and achieve the effect of simple joint structure, large working space and flexible movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
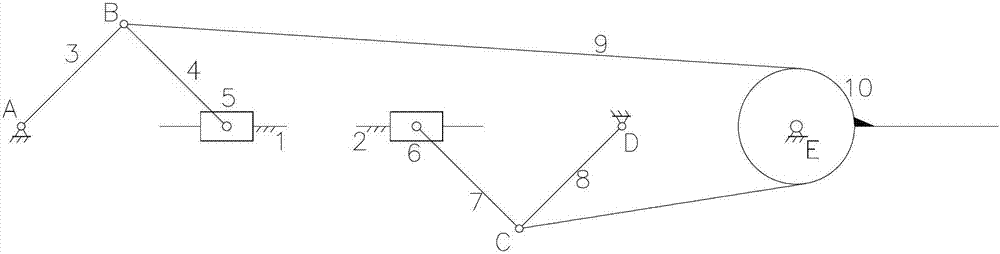
[0025] As shown in Figure 1, a robot joint driven by imitation muscles includes a rear crank slider mechanism, a front crank slider mechanism and a fixed pulley 10, and the rear crank slider mechanism is provided with a rear frame fixed Connected linear guide rail 1, rear slide block 5 is installed on described rear mount rack fixedly connected linear guide rail 1, and described rear mount slide block 5 links to each other with one end of rear mount connecting rod 4; One end of the rear fixed axis rotating crank 3 is installed at the center of rotation A, and the other end of the rear connecting rod 4 is connected with the other end of the rear fixed axis rotating crank 3; the front crank slider mechanism The front rack fixed linear guide rail 2 is provided, and the front slider 6 is installed on the front rack fixed linear guide rail 2. The front slider 6 and one end of the front connecting rod 7 Connected; one end of the front fixed-axis rotating crank 8 is installed at the ...
Embodiment 2
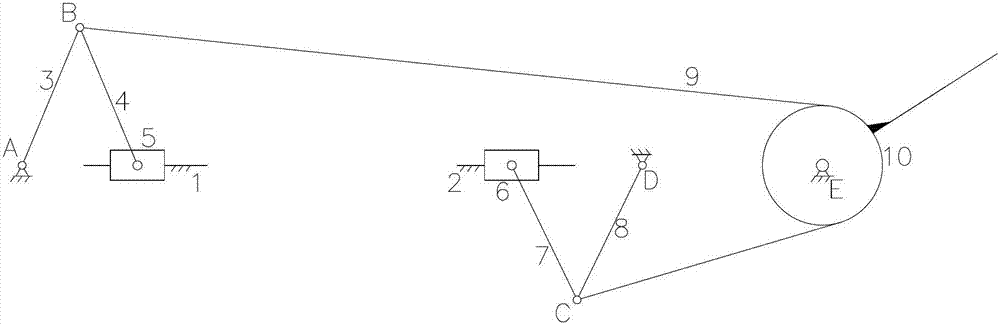
[0028] like Figure 5 As shown, a robot joint driven by imitation muscles includes a rear crank slider mechanism, a front crank slider mechanism and a fixed pulley 10, and the rear crank slider mechanism is provided with a rear rack fixed linear guide rail 1. A rear slider 5 is installed on the fixed linear guide rail 1 of the rear rack, and the rear slider 5 is connected to one end of the rear connecting rod 4; The head end of the rear fixed-axis rotating crank 3 is installed at the place, and the other end of the rear-mounted connecting rod 4 is connected with the end of the rear fixed-axis rotating crank 3; the front crank slider mechanism is provided with a front Set the rack fixed linear guide rail 2, the front slide block 6 is installed on the front rack fixed linear guide rail 2, and the front slide block 6 is connected with one end of the front connecting rod 7; The head end of the front fixed-axis rotating crank 8 is installed at the center of rotation of the front f...
Embodiment 3
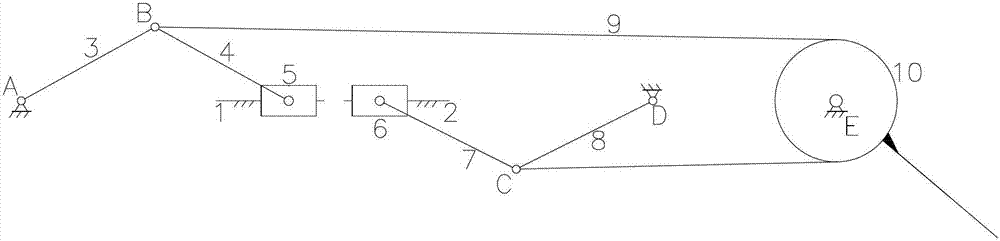
[0031] like Figure 4 As shown, a robot joint driven by imitation muscles includes a rear crank slider mechanism, a front crank slider mechanism and a fixed pulley 10, and the rear crank slider mechanism is provided with a rear rack fixed linear guide rail 1. A rear slider 5 is installed on the fixed linear guide rail 1 of the rear rack, and the rear slider 5 is connected to one end of the rear connecting rod 4; The head end of the rear fixed-axis rotating crank 3 is installed at the place, and the other end of the rear-mounted connecting rod 4 is connected with the end of the rear fixed-axis rotating crank 3; the front crank slider mechanism is provided with a front Set the rack fixed linear guide rail 2, the front slide block 6 is installed on the front rack fixed linear guide rail 2, and the front slide block 6 is connected with one end of the front connecting rod 7; The head end of the front fixed-axis rotating crank 8 is installed at the center of rotation of the front f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More