

3-PRR micro-displacement platform based on symmetrical variable cross-section compliant mechanism
A technology of compliant mechanism and micro-movement platform, applied in the field of 3-PRR micro-movement platform, can solve problems such as affecting transmission accuracy, reducing motion stroke, large elastic resistance, etc., to improve transmission accuracy, increase displacement output, and reduce motion. effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings.
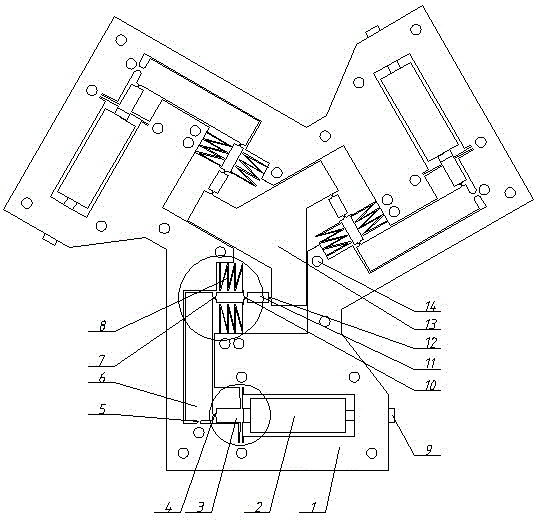
[0015] Such as figure 1 As shown, the 3-PRR micro-motion platform based on the symmetrical cross-section compliant mechanism is a parallel mechanism, which has three degrees of freedom, that is, two translations and one rotation in the plane, and is simultaneously acted by three piezoelectric ceramic drivers through the rod system. A motion mechanism based on a motion platform. The three micro-displacement driving devices 2 are all installed on the fixed platform 1, and there are three branch chains connected between the micro-movement platform 13 and the fixed platform 1, and the three branch chains are in the form of Evenly arranged on the periphery of the micro-movement platform 13, each branch chain includes a symmetrical folding reed type compliance mechanism 8 and a rigid connecting rod 11, one end of the rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More