

Series-parallel micro operation parallel-connection robot mechanical apparatus
A mechanical device and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex structure of 6-degree-of-freedom parallel mechanism, increased height of micro-manipulation robots, and poor motion stability, etc., to achieve compact structure, High resolution and frequency response, easy to control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
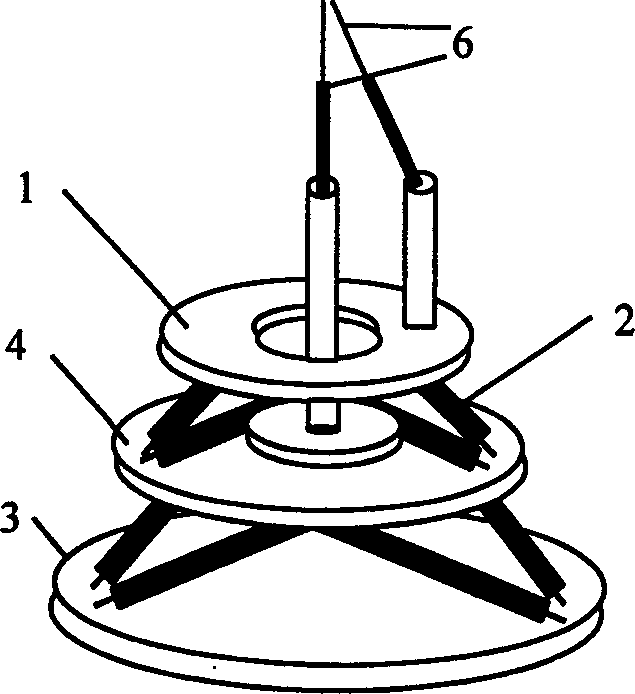
[0029] According to attached Figure 3-7 Complete the technical solution of the present invention by conventional machining technology. All kinematic pairs and other components contained in each kinematic chain in each parallel mechanism in the present invention are processed from one piece of elastic metal material. The invention is driven by a piezoelectric actuator and amplifies the displacement output of the piezoelectric actuator through a micro-displacement amplification mechanism.
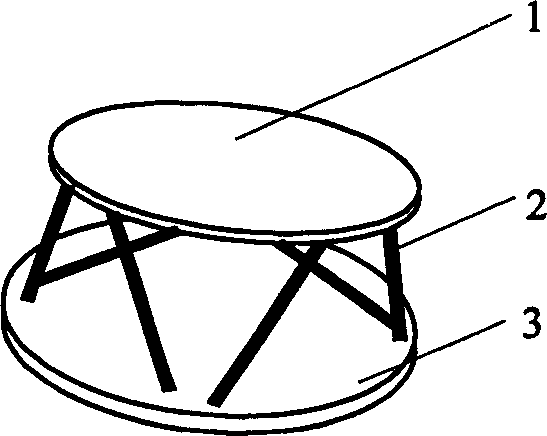
[0030] In the series-parallel micro-operation parallel robot mechanical device, in the connection structure between the disks, the kinematic chain is divided into A type 2a kinematic chain and B type 2b kinematic chain as follows:
[0031] Type B kinematic chain with Image 6 The type A kinematic chain shown is similar in structure, and also includes two Hooke hinges and a micro-displacement amplifier (the latter is equivalent to a sliding pair in the kinematic sense). Such as Figure 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More