

Double-manipulator coordination control system and double-manipulator coordination control method
A technology of coordinated control system and dual manipulators, applied in the field of robotics, can solve the problems of frequent power outages in distribution lines, inability to complete distribution reliability indicators, and inconvenience in people's lives and production.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
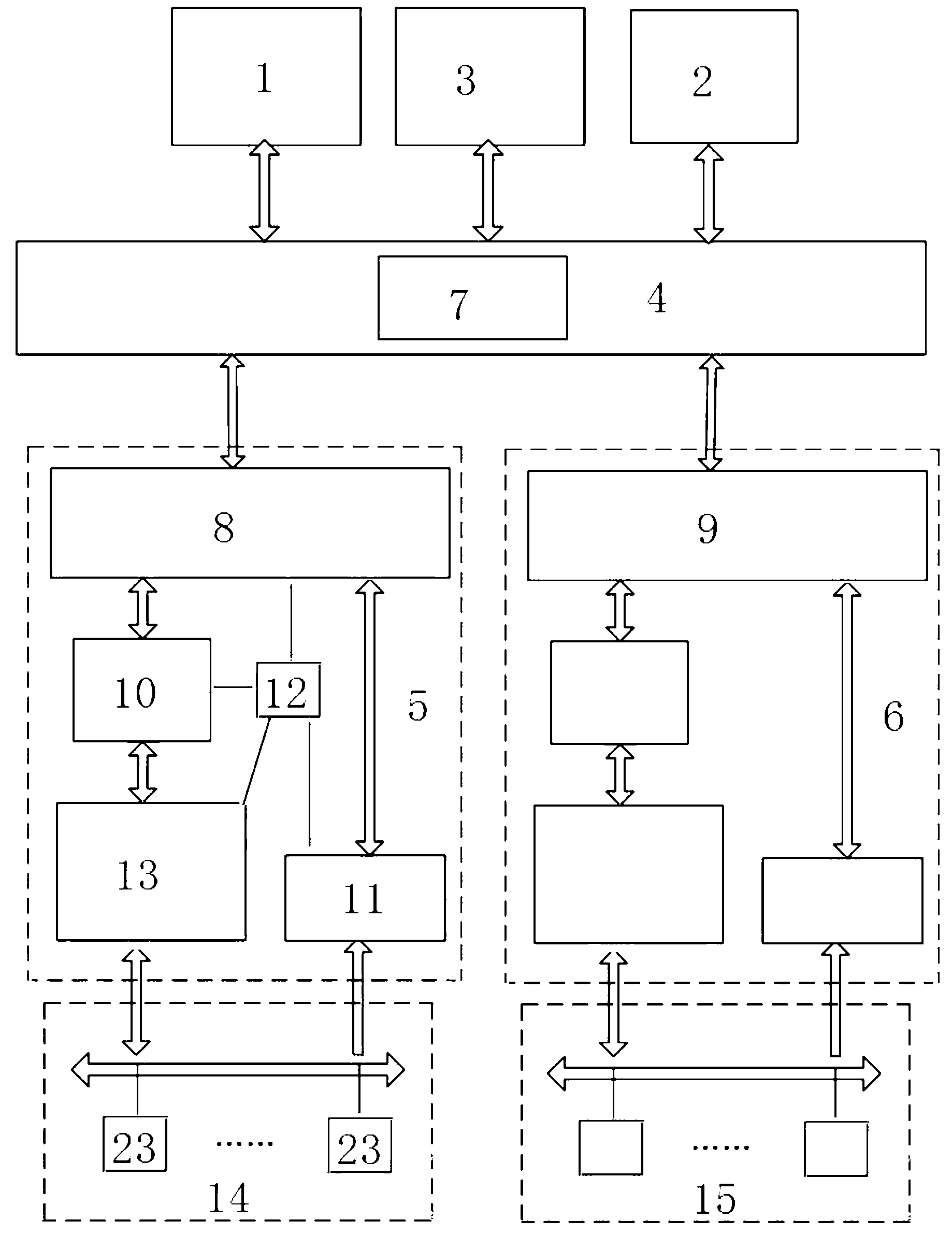
[0051] see figure 1 , a dual-manipulator coordinated control system, including a control keyboard 1, a master manipulator 2, a display 3, a master control cabinet 4, a first slave control cabinet 5; a second slave control cabinet 6.
[0052] The output of the control keyboard 1 is connected to the input of the main control cabinet 4, the input and output of the main control cabinet 4 are connected to the input and output of the display 3, and the output of the main manipulator 2 is connected to the input of the main control cabinet 4.
[0053] The master control cabinet 4 includes a third industrial computer 7 , and the network ports of the master control cabinet 4 communicate with the network ports of the first slave control cabinet 5 and the second slave control cabinet 6 respectively. The third industrial computer 7 of the master control cabinet 4 c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More