Vehicle identification method based on depth information
A technology of depth information and vehicle recognition, applied in the field of vehicle recognition based on depth information, can solve problems such as loss, affecting the accuracy of feature extraction, large measurement errors, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention is further described by examples below; the present embodiment implements on the premise of the technical solution of the present invention, and uses the laser radar as the ranging sensor, provides detailed implementation and specific operation process, but protection scope of the present invention It is not limited to the following examples.
[0047] This embodiment is realized according to the following steps:
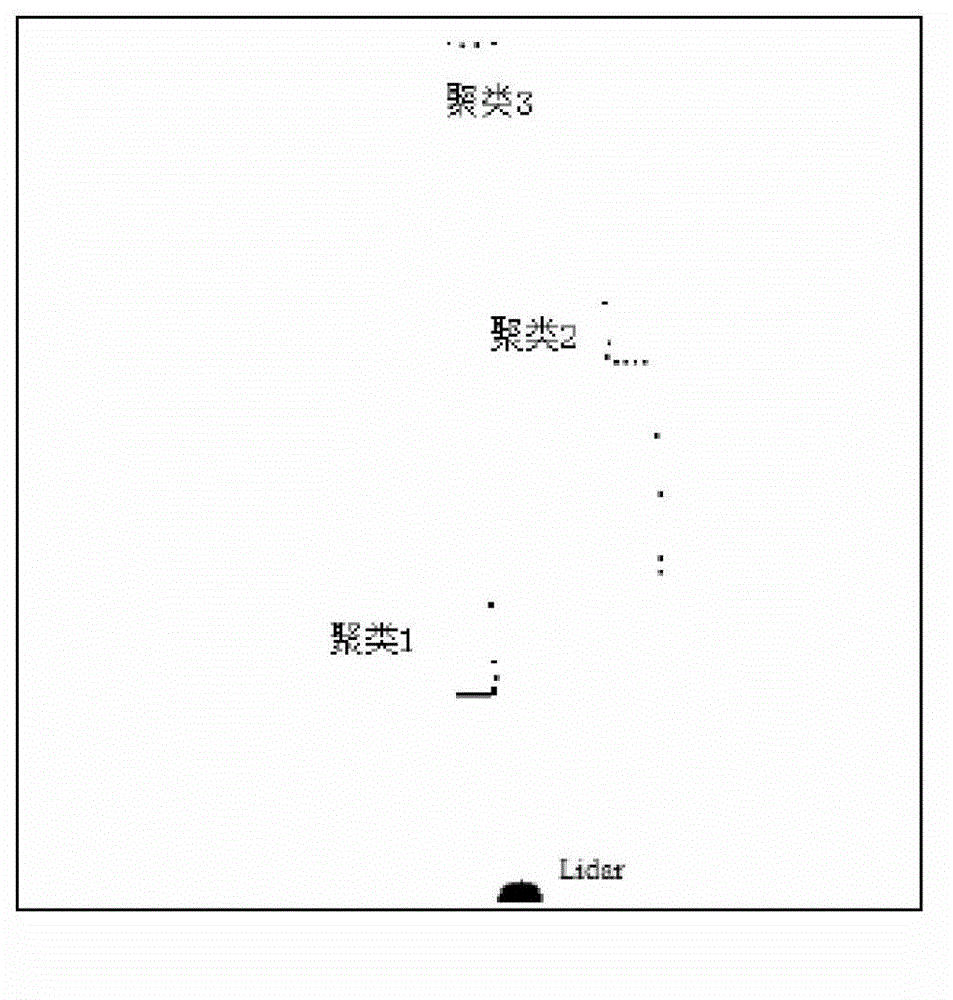
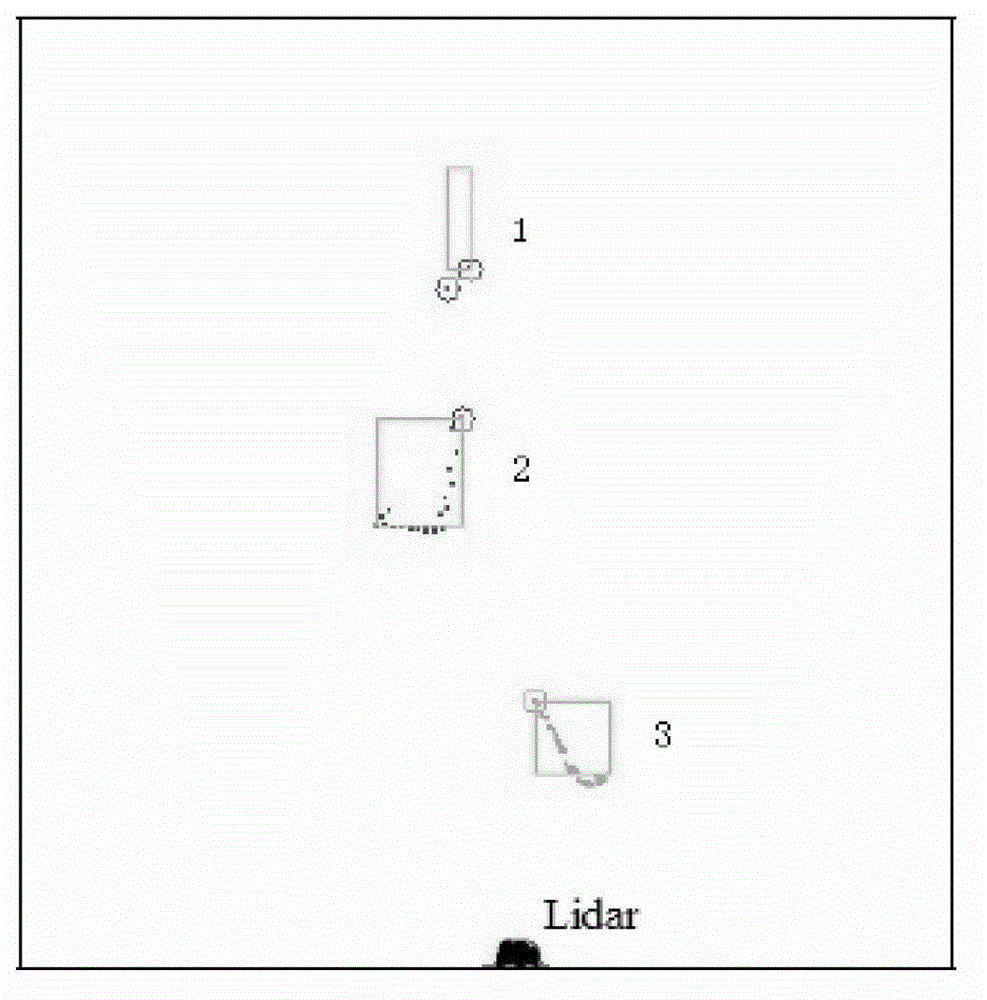
[0048] Step 1: The vehicle-mounted lidar starts scanning, the scanning range is 180 degrees, the maximum scanning distance is 80m, the angle between two scanning rays is 0.5 degrees, and each frame of data contains 361 scanning points. Convert the scan point from polar coordinates to Cartesian coordinates.
[0049] Step 2: After reading in the data, remove the points with a horizontal distance of more than 3 meters from the vehicle, that is, only consider the targets on the road, and ignore obstacles such as green belts and street lights...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com