

Six-dimensional force and torque sensor for measuring large force and small torque of large mechanical arm
A torque sensor and large-scale machinery technology, applied in the direction of measuring force components, measuring devices, instruments, etc., can solve the problems of sensor measurement range asymmetry, reduce sensor stiffness, reduce resolution, etc., achieve small coupling error, small size, The effect of high sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
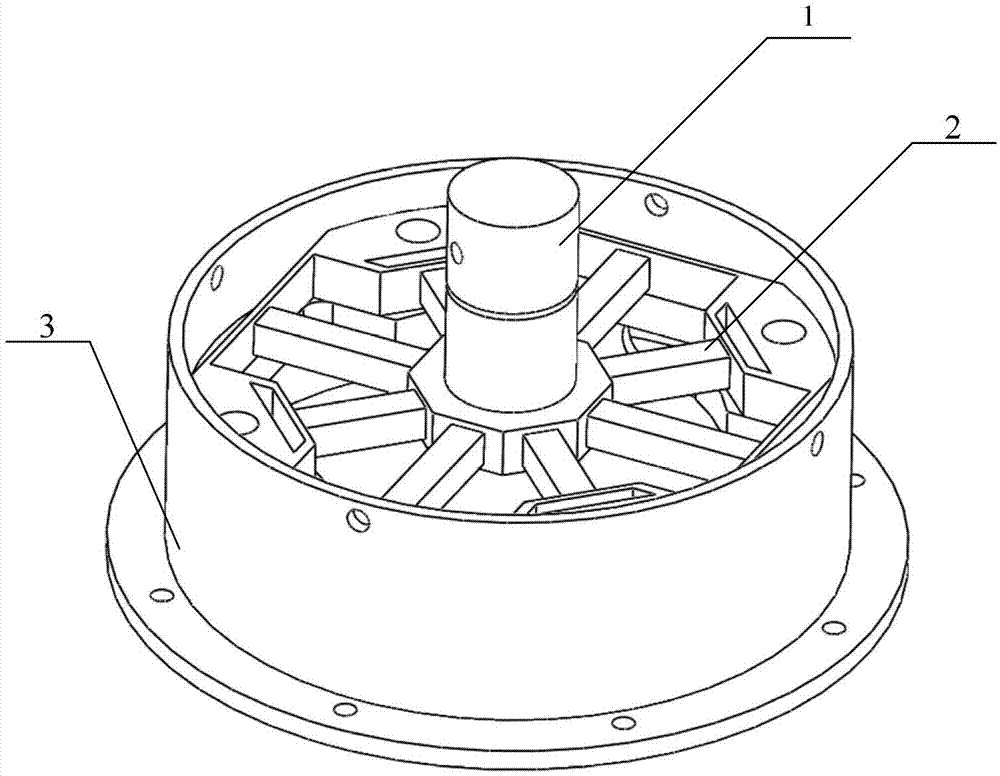
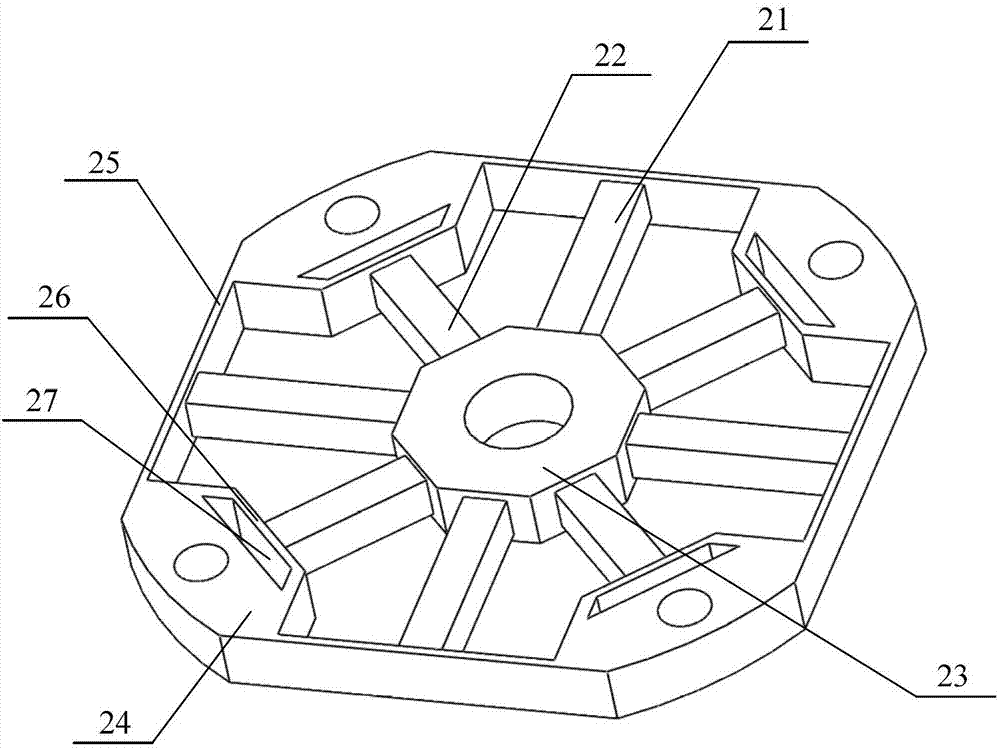
[0041] Such as Figure 1 to Figure 4 As shown, a six-dimensional force and moment sensor for measuring large forces and small moments of a large mechanical arm according to the present invention includes a central axis 1, a force sensitive element 2, a base 3 and a strain gauge assembly. The force sensitive element 2 is fixedly connected to the base 3 , the central axis 1 passes through the force sensitive element 2 and the base 3 , and the central axis 1 is in interference fit with the force sensitive element 2 , and the strain gauge assembly is attached to the force sensitive element 2 . Through the rotation of the central shaft 1, the rotation of the entire sensor is driven to realize the measurement of force and moment. The force-sensitive element 2 includes four elastic main beams 21 , four elastic sub-beams 22 , a regular octagonal ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More