

Three-degree of freedom parallel serial upper limb rehabilitation robot
A rehabilitation robot and degree-of-freedom technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems that the robot movement is not stable enough, it is difficult to achieve the rehabilitation effect, and the patient's condition is adversely affected. The effect of relatively high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
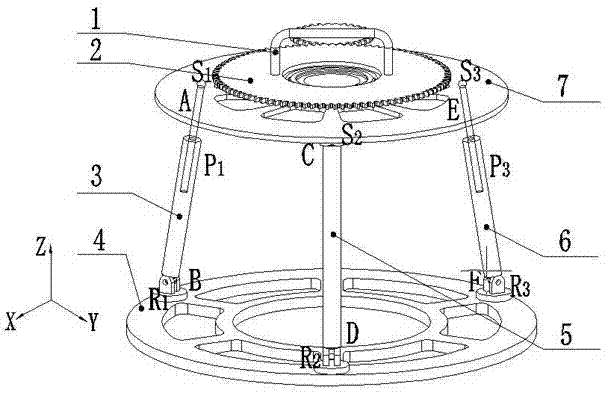
[0013] The moving platform 7 is connected by three branch chains namely branch chain AB3, branch chain CD (5), branch chain EF (6) and static platform (4). where the branched chain AB(3) consists of vice, vice, Vice composition, branched chain EF(6) consists of vice, vice, sub-components, of which vice, The pairs are respectively connected on the static platform (4), placed in the middle vice, vice, vice, The pairs are respectively connected on the moving platform (7), and the branch chain CD (5) is formed by vice, vice composition, The secondary connection is on the static platform (4), The pair is connected to the moving platform (7), and vice, vice, Auxiliaries are distributed at 120° (ACE is in the shape of an equilateral triangle) on the moving platform (7), vice, vice, Auxiliaries are distributed at 120° (BDF is an equilateral triangle) on the static platform (4), and vice, The auxiliary and auxiliary axes form an angle of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More