Robot track positioning method and robot track positioning system
A technology of robot positioning and positioning method, which is applied in the field of positioning, and can solve the problems of difficult simultaneous realization of positioning systems, the influence of dust and particles, low accuracy of ultrasonic positioning and RFID positioning, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
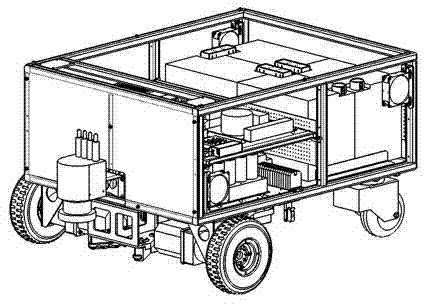
[0028] The present invention takes a robot (a special operating robot for a switchgear) as an example to specifically illustrate the present invention.
[0029] A robot track positioning system, comprising a KYN robot, at least one track with a gap, a sensing device installed on the KYN robot for retrieving the gap on the track, a mileage device installed on the KYN robot, and the KYN robot passes through the track can reach the specified position, and,
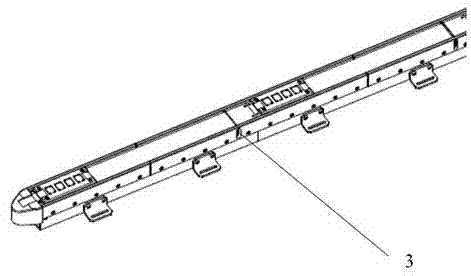
[0030] The distance between the positioning gaps of the track is set to be asymmetrical and the distance between any two gaps is guaranteed to be unequal;
[0031] The processing unit on the robot is used to read the positioning gap information on the track where the robot is located through the sensing device, and use the distance information between the mileage information in the mileage device and the preset positioning gap to know the current position of the robot. location information.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More