

System and method for positioning mobile robot based on regular graphic code composite tags
A mobile robot and composite label technology, applied in the field of mobile robot positioning system based on regular graphic code composite label, can solve the problems of poor clarity, limited thinking, low recognition rate, etc., and achieve reasonable design and more flexibility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
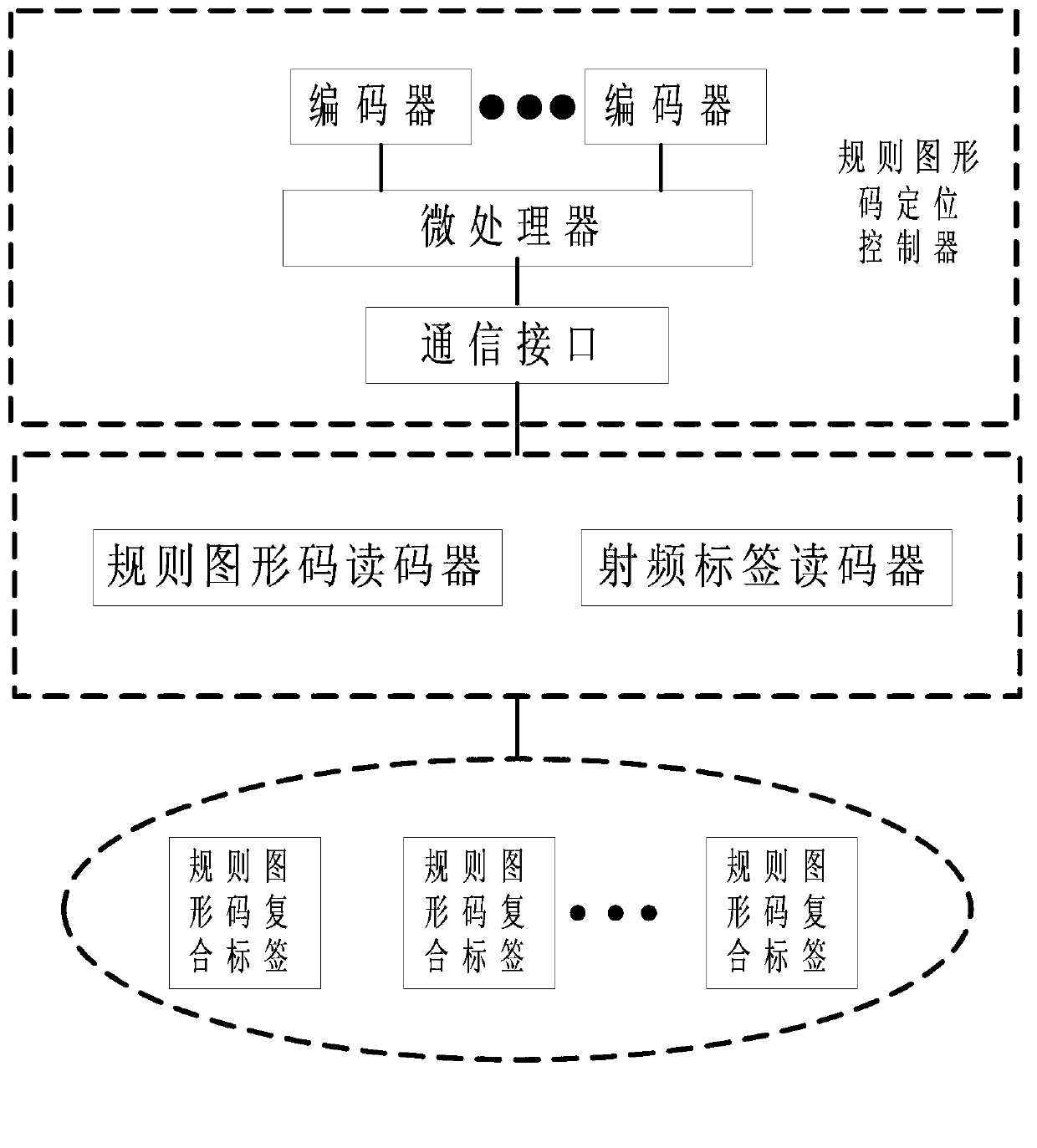
[0072] A mobile robot positioning system based on regular graphic code composite labels, such as figure 1 As shown, it includes a regular graphic code positioning controller installed on the mobile robot trolley, a regular graphic code code reader, a radio frequency tag reader, and a regular graphic code composite label distributed on the ground. The regular graphic code positioning controller passes the regular The graphic code reader and the radio frequency tag reader read a certain number of regular graphic code composite labels to realize the precise guidance function of the mobile robot. The mobile robot positioning system has a three-layer system structure. The first layer is a regular graphic code positioning controller installed on the mobile robot. The regular graphic code positioning controller is composed of an encoder, a microprocessor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More