Stereo matching optimization method for binocular vision system
A binocular vision system and stereo matching technology, applied in the field of computer vision, can solve the problems of complex calculation factors, unfavorable precision image recognition applications, and increased application costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
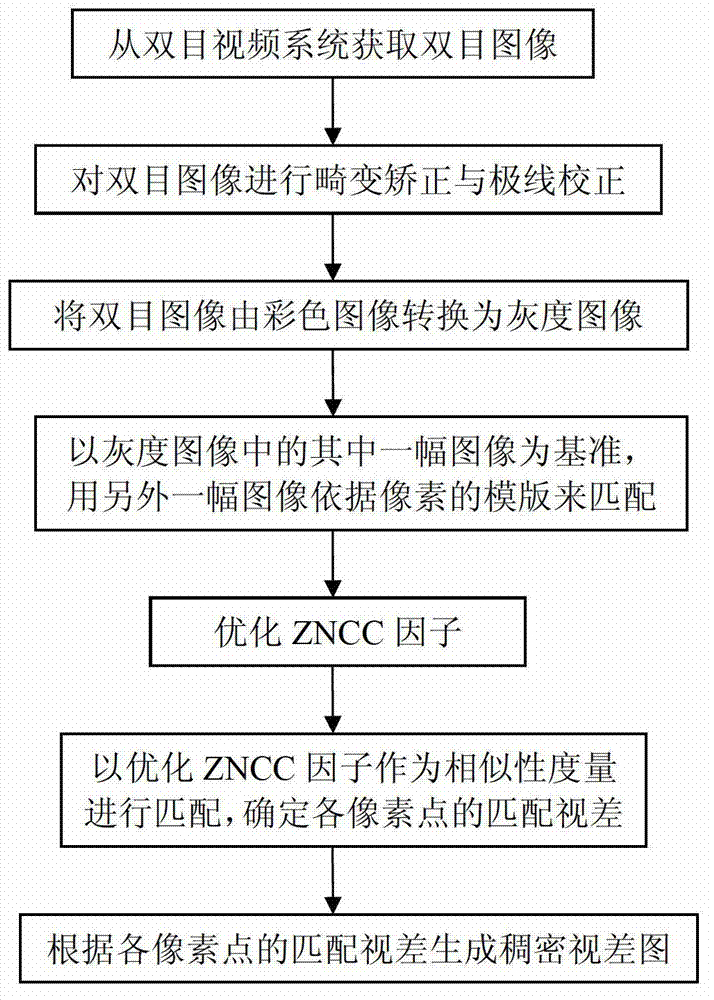
[0058] Such as figure 1 As shown, the stereo matching optimization method of the binocular vision system of the present invention comprises the following steps:
[0059] a. Obtain binocular images from a binocular video system;
[0060] b. Perform distortion correction and epipolar line correction on the binocular image;
[0061] c. Convert the binocular image from a color image to a grayscale image;
[0062] d. Based on the left image in the binocular image converted to a grayscale image, use the right image to match the pixel-based template;
[0063] e. Optimize the ZNCC factor;
[0064] f. Use the optimized ZNCC factor as a similarity measure to perform matching calculations to determine the matching parallax of each pixel;
[0065] g. Generate a dense disparity map based on the matching disparity of each pixel.
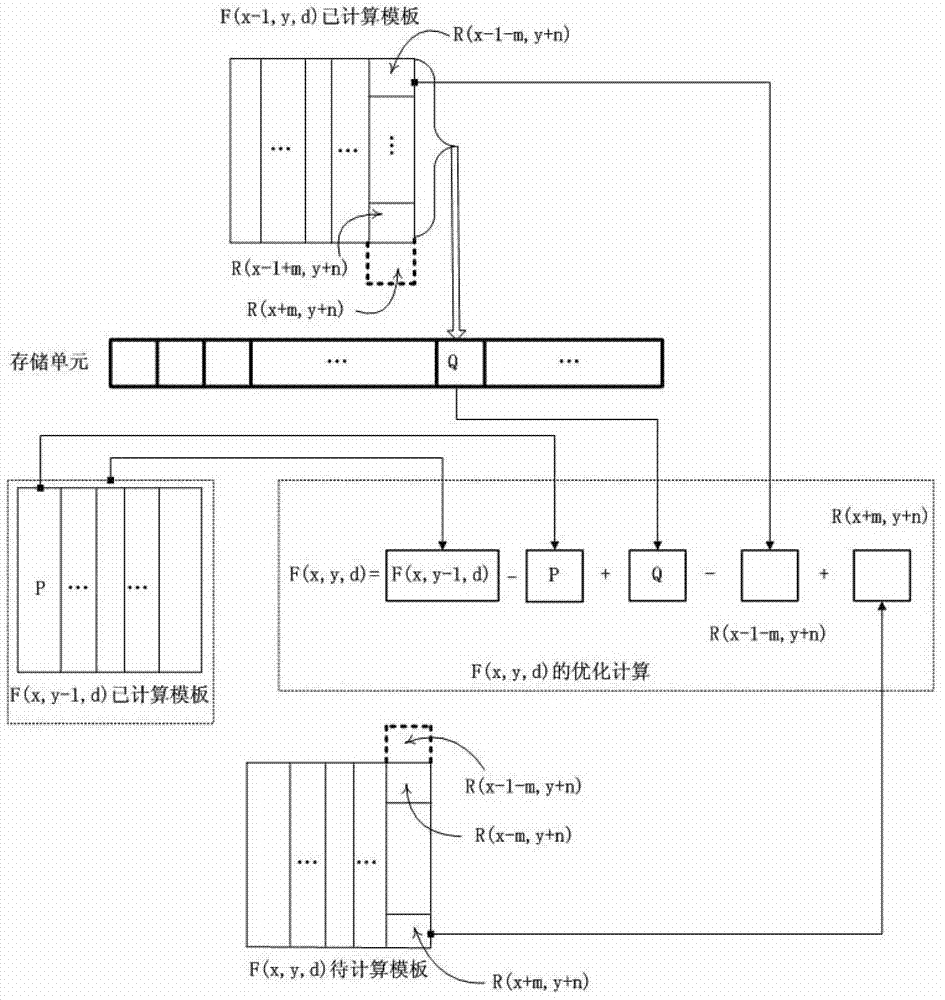
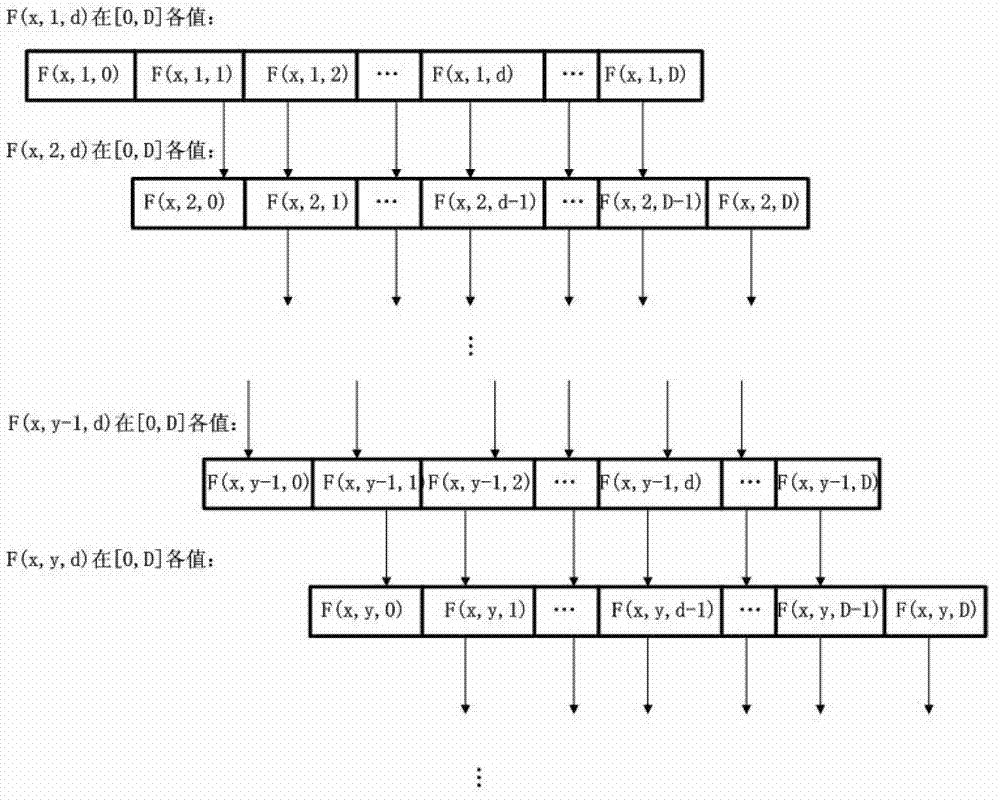
[0066] Such as figure 2 As shown, the calculation diagram of F(x,y,d) here is suitable for the four sum values SI in the ZNCC factor 1 (x,y), SI 2 (x,y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



