

Doppler velocity log (DVL) parameter calibration method used for integrated navigation system of underwater inertial navigation system (INS) and DVL
An integrated navigation system and integrated navigation technology, applied in the field of DVL parameter calibration, can solve problems such as difficult to ensure the installation accuracy of DVL and INS, difficult to meet the high-precision requirements of long-range underwater vehicles, and complicated operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
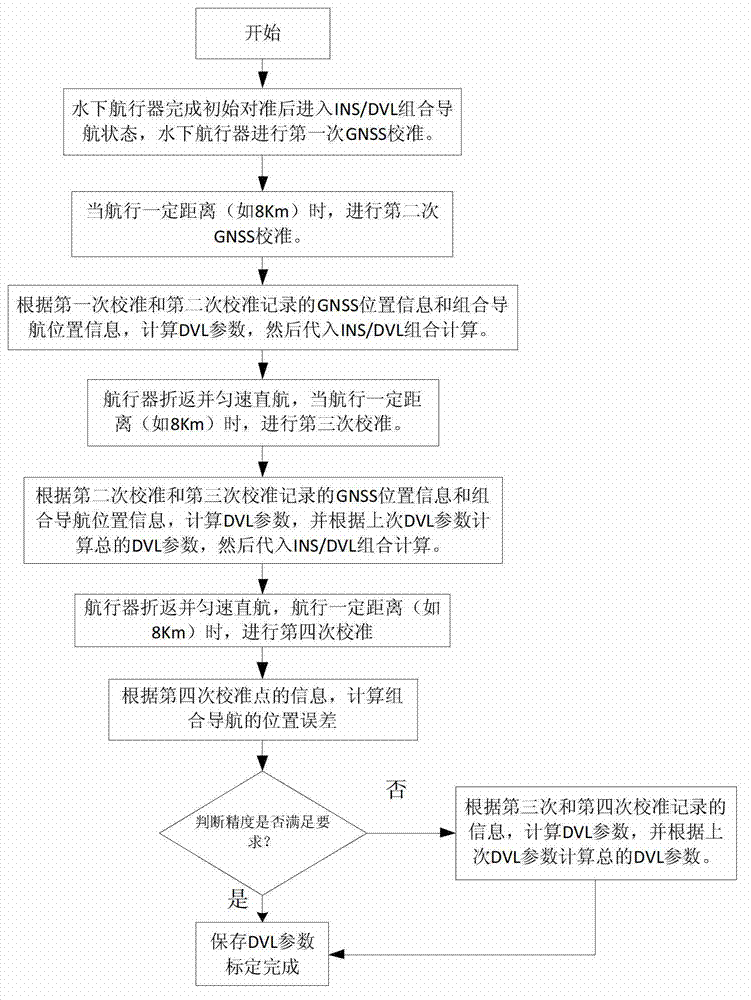
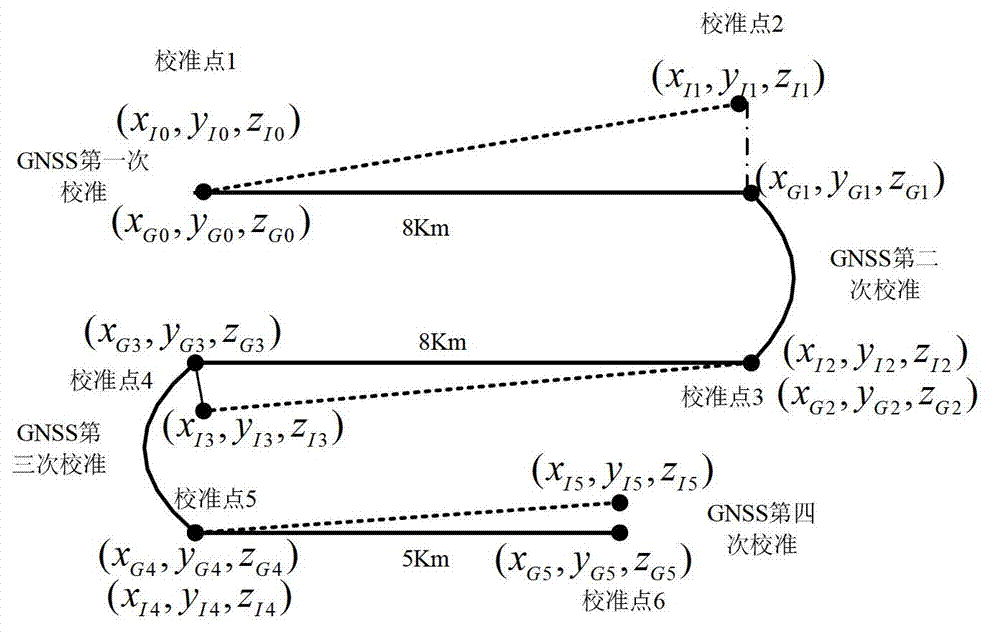
[0039] Such as figure 1 and figure 2 Shown, the DVL parameter calibration method that is used for underwater INS and DVL integrated navigation system of the present invention, its flow process is:
[0040] (1) The first GNSS calibration: After the underwater vehicle completes the initial alignment, enter the SINS / DVL integrated navigation state, surface to receive GNSS signals, perform the first GNSS calibration, and record when the last GNSS position is valid The position of the integrated navigation based on the earth-centered earth-fixed coordinate system (x I0 ,y I0 ,z I0 ) and GNSS position information based on the earth-centered earth-fixed coordinate system (x G0 ,y G0 ,z G0 ), as the information of figure 2 Calibration point 1 shown;
[0041] (2) The second GNSS calibration: the underwater vehicle sails directly at ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More