

Three-shaft telescopic multi- adaptability underwater robot
An underwater robot and adaptable technology, applied in manipulators, claw arms, manufacturing tools, etc., can solve problems such as inconvenience of movement, limited flexibility, and inability to twist, and achieve good practicability, high efficiency, and free operation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
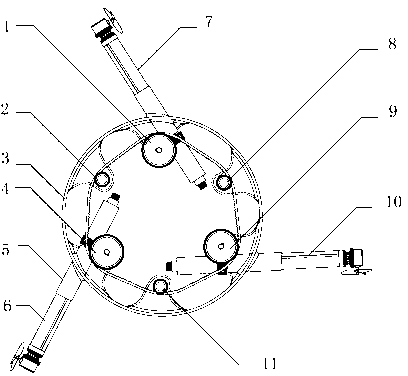
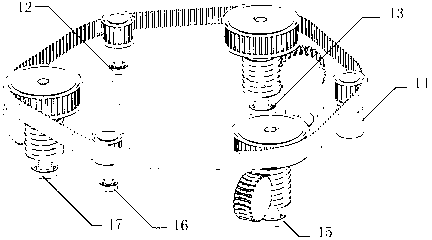
[0026] Such as figure 1 and figure 2 As shown, the upper and lower covers of the box body 3 are detachable, and a conduit 5 protrudes from the inner wall of the box body 3, the driving gear drives the motor 14, the first tensioning gear 2, the second tensioning gear 11, the first driven gear 1, the second tensioning gear The second driven gear 4 and the third driven gear 9 are evenly distributed on the inner ring of the box wall, and the driving gear drive motor 14 is fixedly installed on the box body 3. Moving gear 9, the first tensioning gear 2 and the second tensioning gear 11 are installed on the casing 3 by bearings 12,13,15,16,17. The first power arm 6, the second power arm 7 and the third power arm 10 move in the conduit 5 of the box body 3, which ensures the stability of the power arms with different lengths when working.
[0027] Such as image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More