

Dual-model lane line identification method based on dynamic area division
A lane line recognition and dynamic area technology, applied in character and pattern recognition, instruments, computer components, etc., can solve problems such as poor lane line accuracy, large algorithm calculations, and insufficient area planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
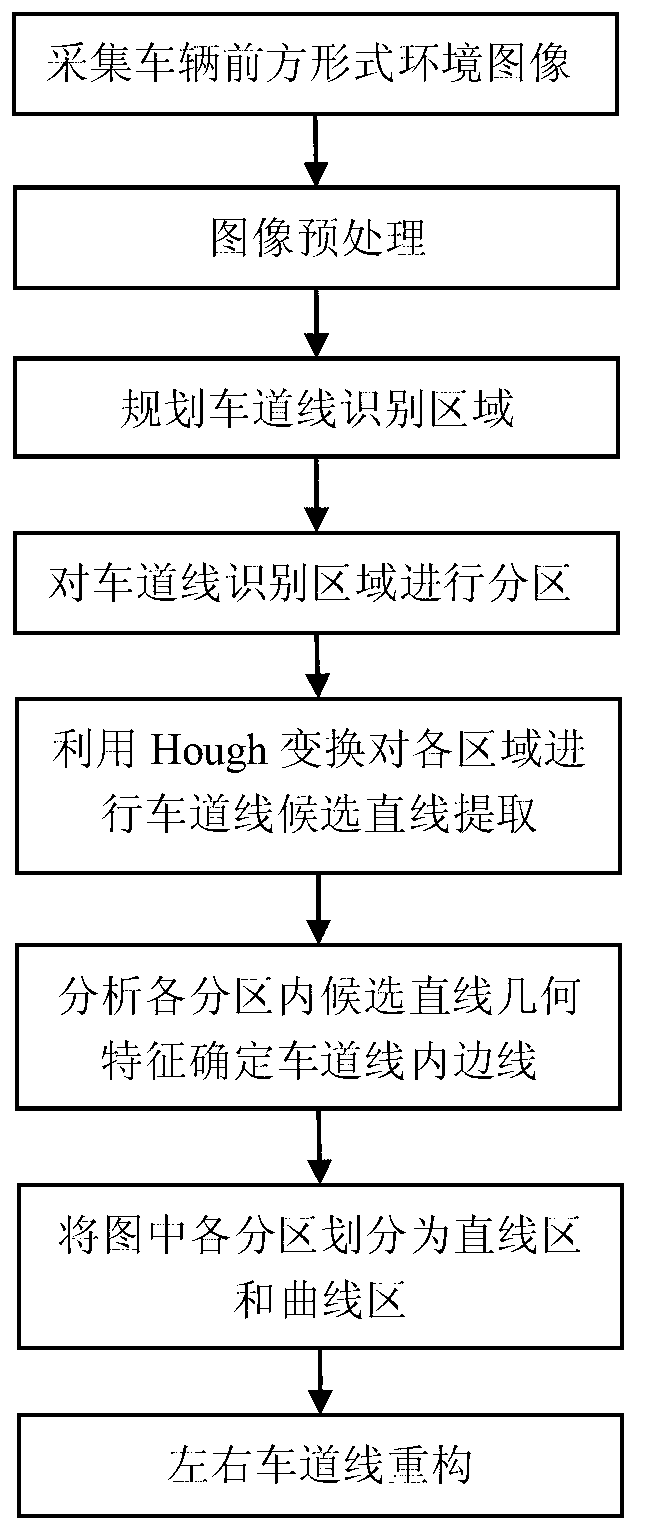
[0056] See attached figure 1 , a dual-model lane line recognition method based on dynamic area division, which includes the following steps:
[0057] Step 1, collecting the original image I of the environment in front of the vehicle;
[0058] During the driving process of the vehicle, the original image I of the driving environment in front of the vehicle is collected by the image sensor installed under the front windshield of the vehicle, and the upper left corner of the original image I is set as the origin of the image coordinate system, and the horizontal direction to the right is the positive direction of the x-axis. Vertically downward is the positive direction of the y-axis, and the original image I is as Figure 5 As shown, the original image I is a matrix of 752 × 480, and each element in the matrix represents a gray value;
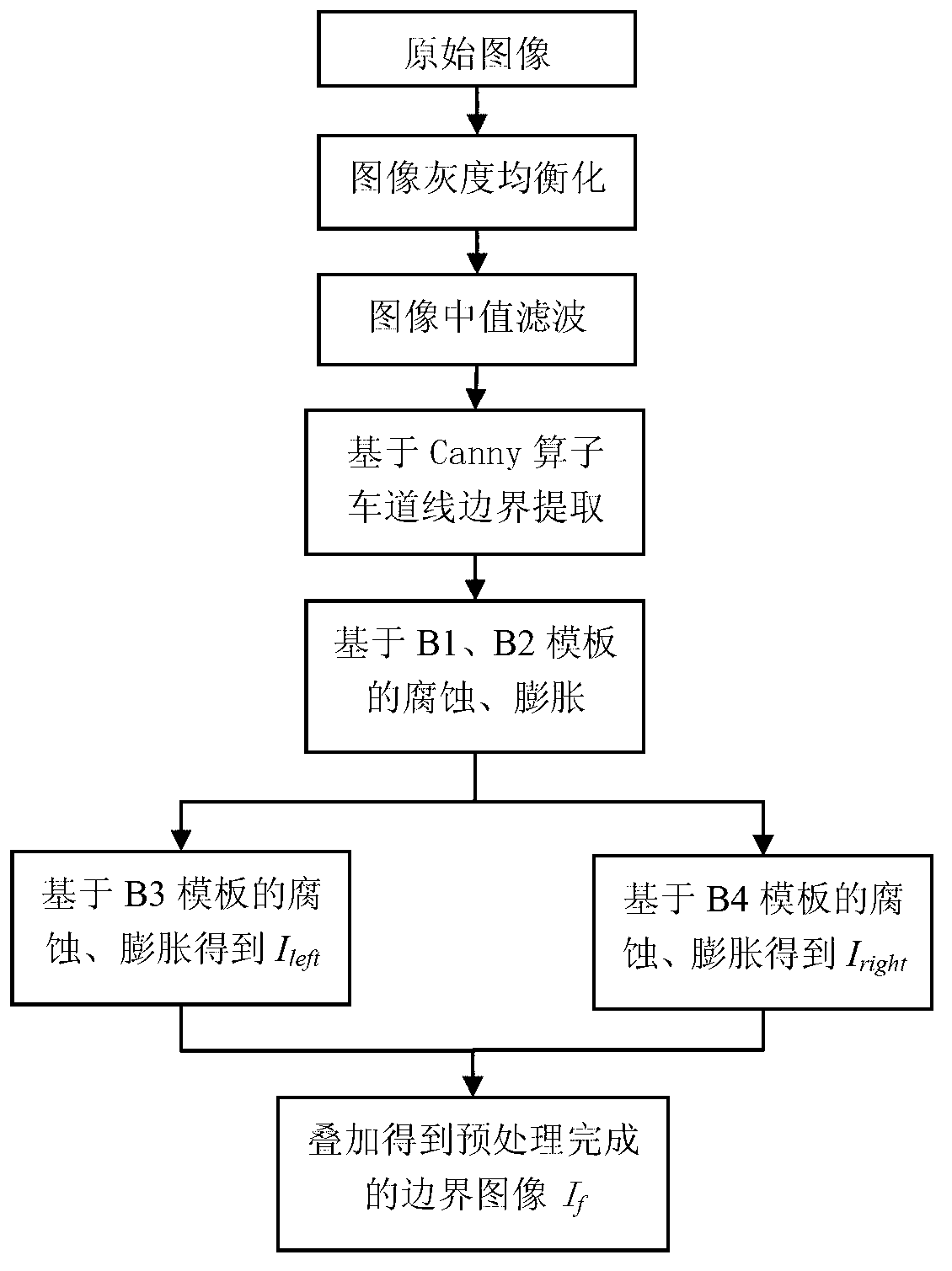
[0059] See attached figure 2 , step 2, the original image I is preprocessed, and the specific steps include:
[0060] 2.1 Perform gray leve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More