

Microgyroscope fuzzy self-adaptation control method based on T-S model
A technology of fuzzy self-adaptation and micro-gyroscope, which is applied in the direction of self-adaptive control, general control system, control/regulation system, etc. It can solve the problems that have not been considered, and achieve the effect of improving robustness and compensating manufacturing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
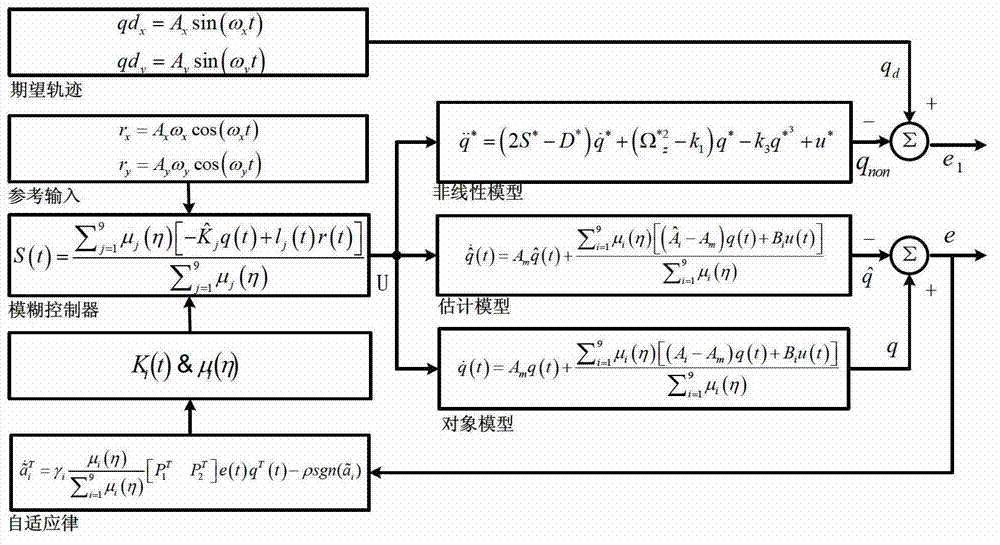
[0066] Such as figure 2 As shown, the micro-gyroscope fuzzy adaptive control method based on the T-S model mainly includes the following steps
[0067] 1. Establish the dimensionless nonlinear motion vector equation of the micro gyroscope
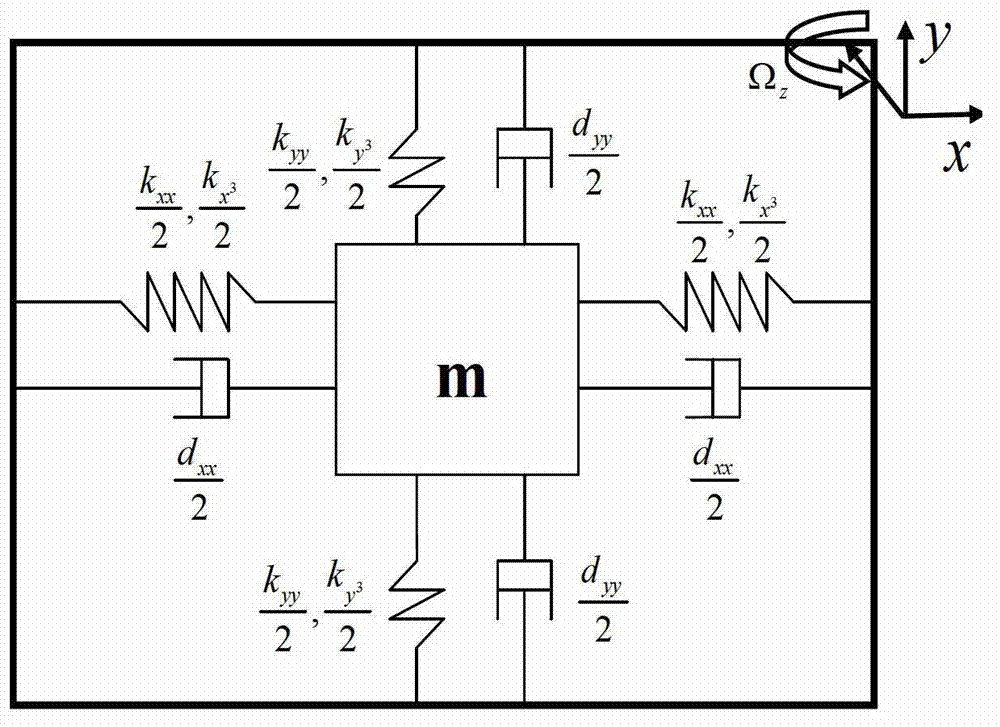
[0068] A micro-vibration gyroscope generally consists of three components: a mass supported by an elastic material, an electrostatic drive device, and a sensing device. The main function of the electrostatic driving device is to drive and maintain the constant amplitude of the vibration of the micro-vibration gyroscope; the sensing device is used to sense the position and speed of the mass block. The micro gyroscope can be regarded as a damped vibration system composed of a mass block and a spring. figure 1 A simplified model of the microvibration gyroscope in Cartesian coordinates is shown. The Z axis repres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More