

Rotary-table servo system neural network control method
A technology of neural network control and servo system, which is applied in the field of adaptive robust finite-time neural network control of turntable servo system, which can solve the problems of low control accuracy, difficulty in obtaining the inverse model of the dead zone accurately, complex calculations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
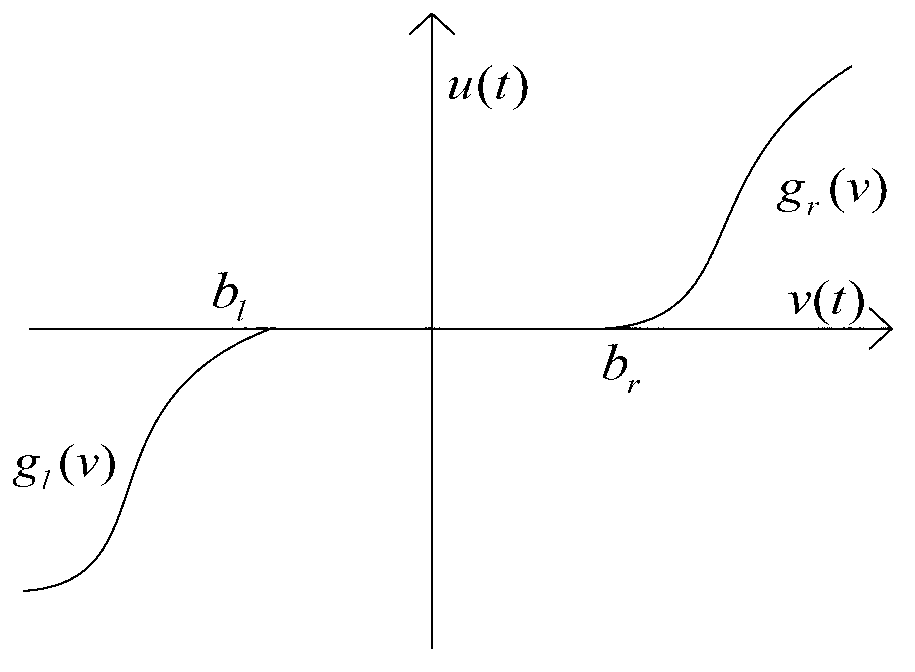
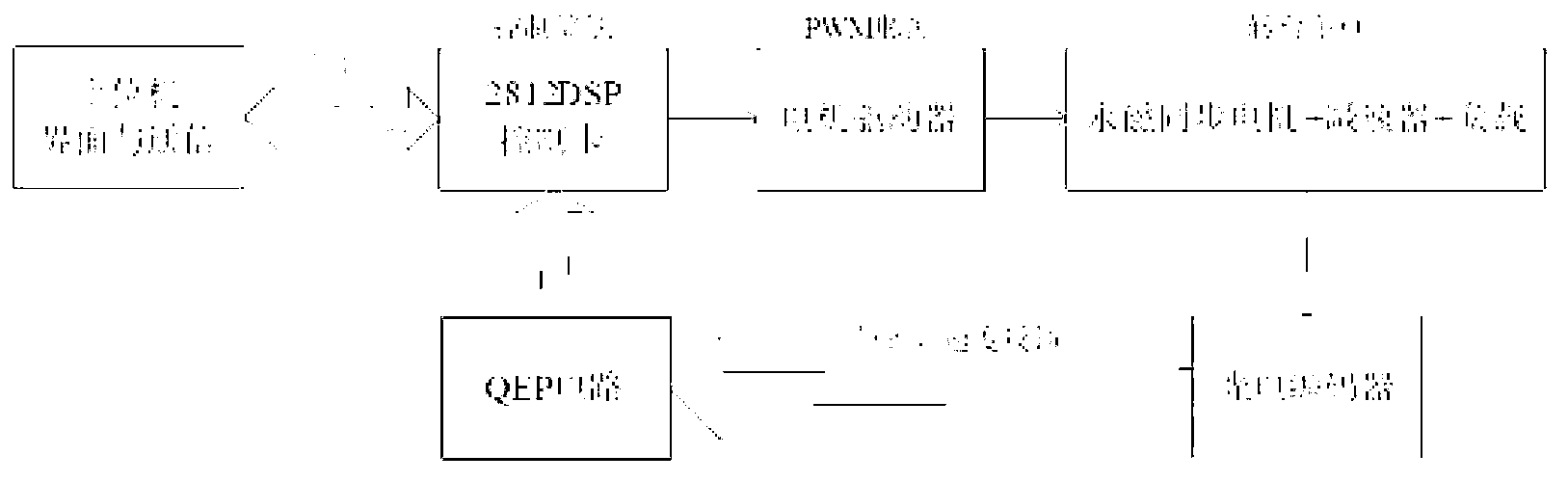
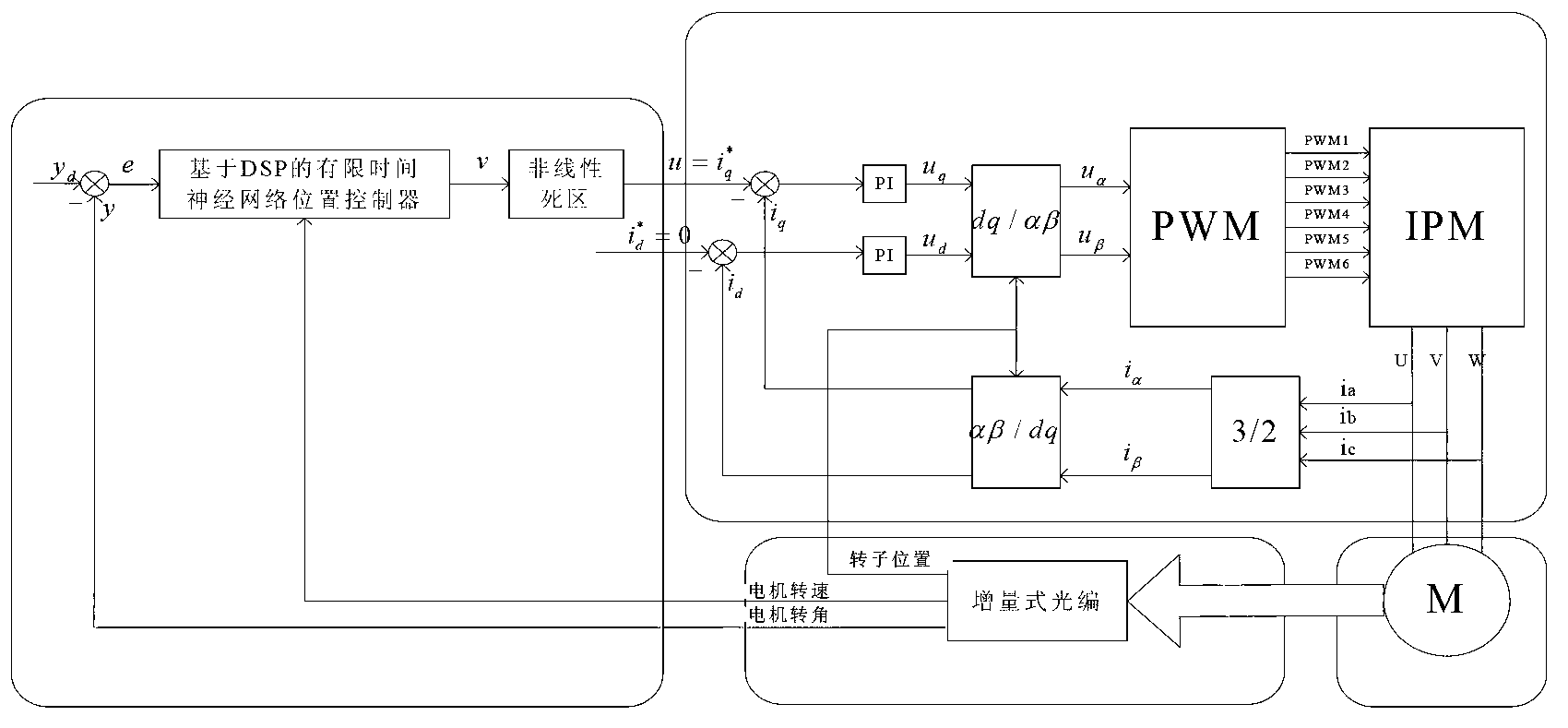
[0074] Refer to attached Figure 1-4 , the design of an adaptive robust finite-time neural network control method for a turntable servo system with an unknown dead zone, including the following steps:
[0075] 1. Establish the mechanical dynamic model of the permanent magnet synchronous motor turntable servo system:
[0076] m x · · + f * ( x ‾ , t ) + d * ( x ‾ , t ) = k 0 * u ( t ) (1)
[0077] y=x(t)
[0078] in, y(t)∈R represent the system state, control input voltage and motor output, res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More