

Method for solving multiple mobile robot path conflict based on buffer area
A mobile robot and conflict resolution technology, which is applied in the field of multi-mobile robot path conflict resolution based on buffer zone, can solve problems such as affecting operation efficiency, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
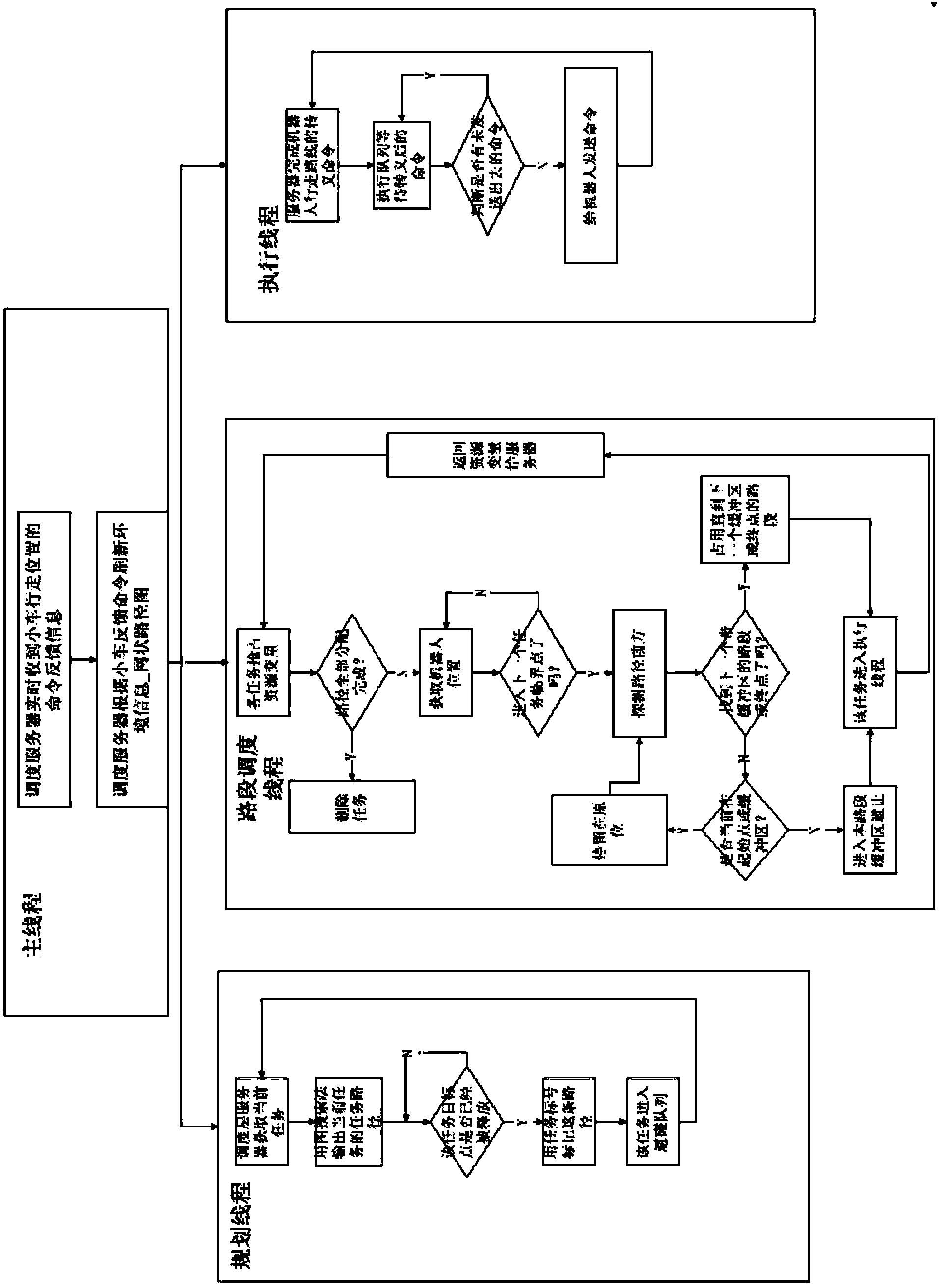
[0051] A buffer-based path conflict resolution method for multiple mobile robots, such as figure 1 As shown in , it includes the main thread in the scheduling server, the parallel execution planning thread, the link scheduling thread and the execution thread. in:
[0052] Described main thread comprises the following steps:
[0053] Step A1: The main thread initializes a network path map;
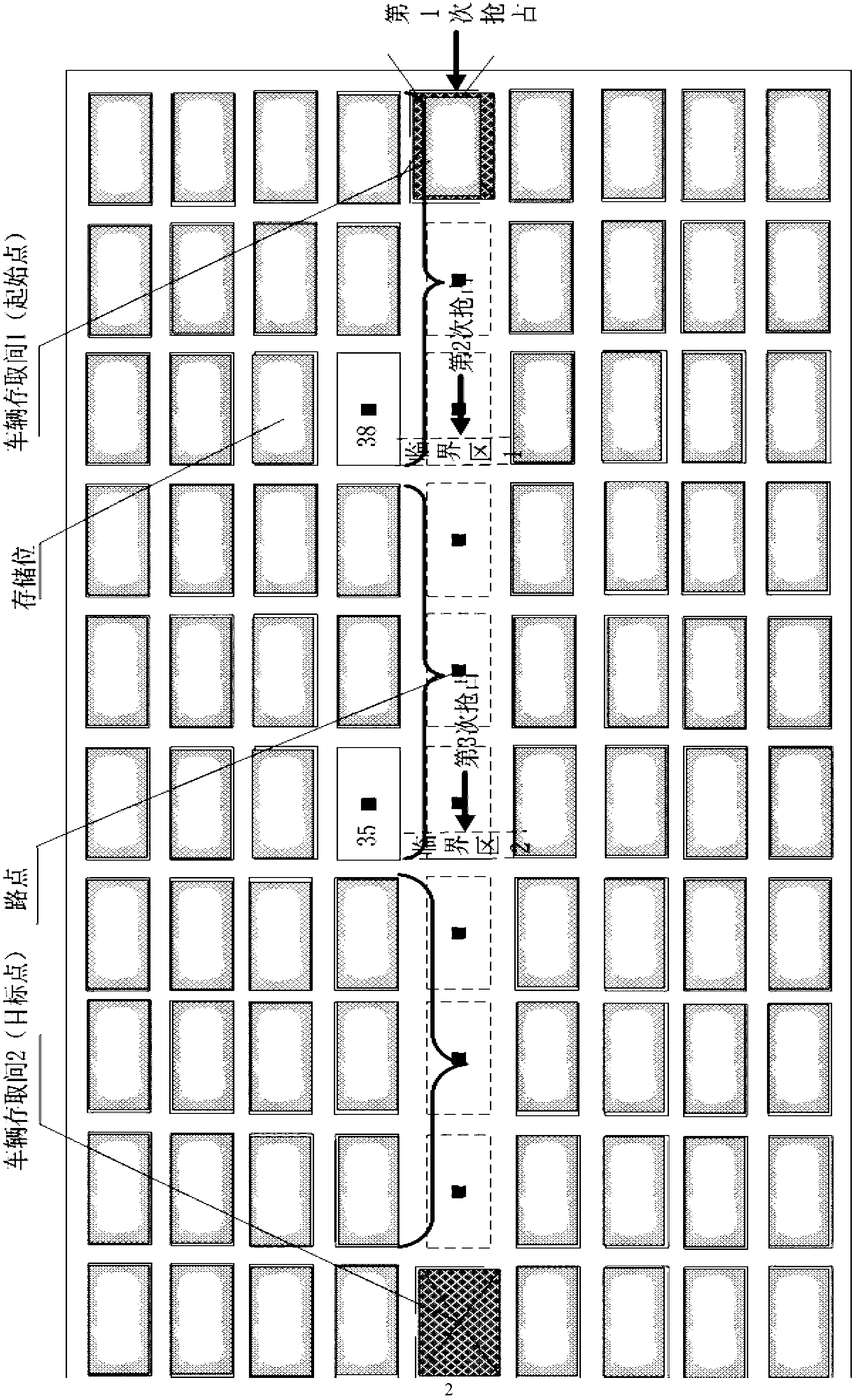
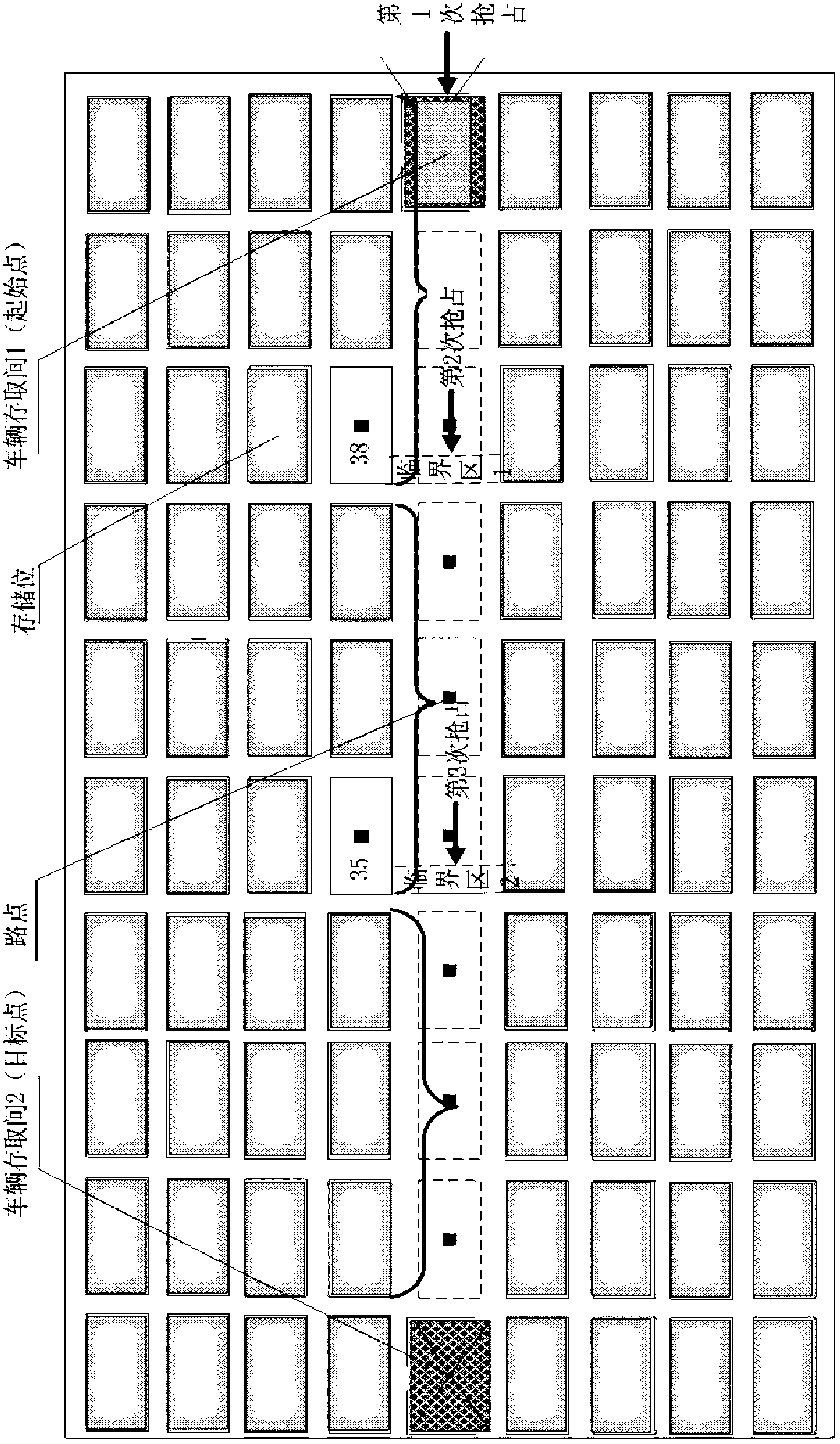
[0054] In this step, the method for establishing and initializing the network path graph includes the following processing procedures:
[0055] (1) Obtain the storage bitmap of the dense storage area;
[0056] ⑵Establish storage point: Take the center point of each storage bit as the storage point;
[0057] (3) Establish waypoints: take the center point of the walkable area with the same size as the storage point area on the roadway as the waypoint, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More