

Phase plane self-adaptation control method based on characteristic model
A technology of adaptive control and feature model, which is applied in aircraft control, flight direction control, aircraft parts, etc., can solve problems such as plume interference and large flexibility of sailboards, and achieve the effect of solving system delays
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
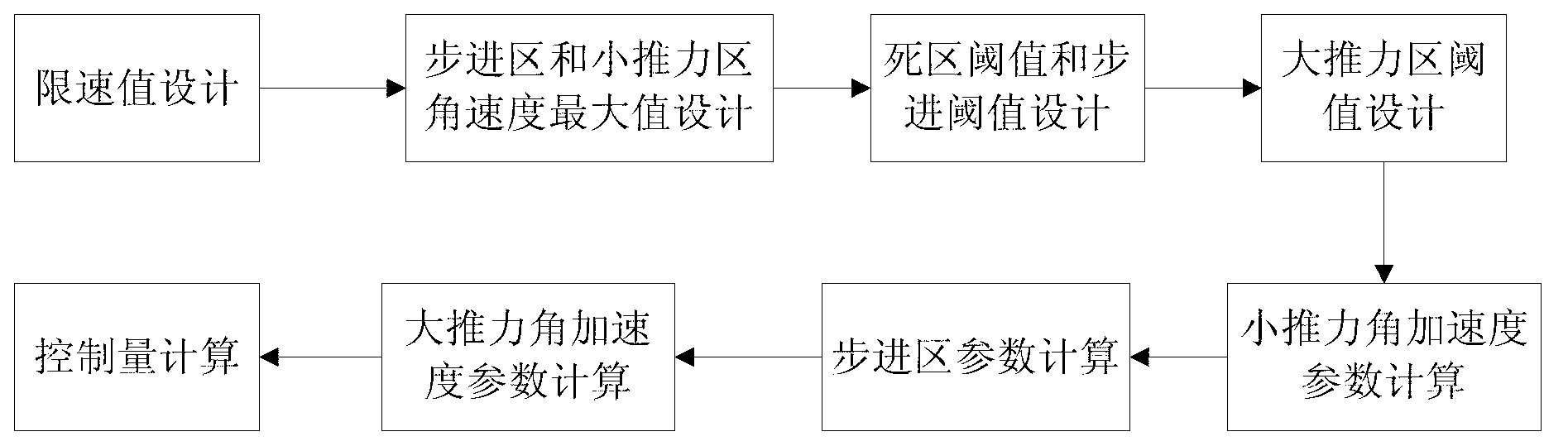
[0048] The realization steps of the present invention are as follows:
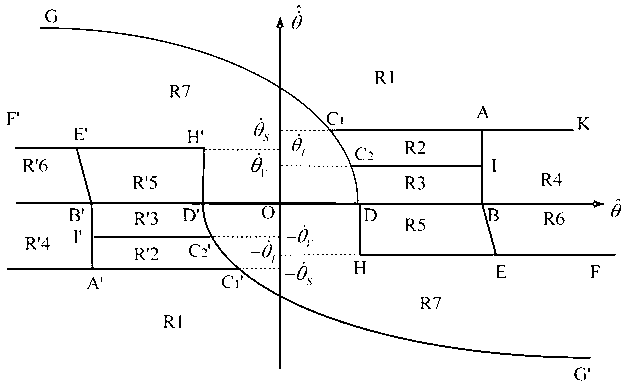
[0049] (1) According to the system delay ΔT delay and dynamic performance requirements to design the speed limit value in the jet control law Let the system delay be ΔT delay , large thrust angular acceleration a JL , the control performance requires that the allowable range of angular velocity is Then the speed limit value in the jet control law can be designed make it satisfy and θ · L = [ θ · min , θ · max ] .
[0050] (2) According to the system dynamic performance requirements, and consider the speed limit value designed in step (1) Designing the Maximum Angular Velocity in the Stepping Region in the Jet Control Law an...
Embodiment 2
[0070] The method for adaptively adjusting the phase plane parameters according to the characteristic parameters is given below.
[0071]If the horizontal and vertical axes of the phase plane are replaced by relative position and relative velocity, the phase plane control method can also be applied to translation control. In the rendezvous and docking section, the tracker approaches the target along the docking corridor. As the longitudinal relative distance decreases, the accuracy of lateral position control is required to gradually increase. At this time, the longitudinal relative distance can be selected as the characteristic parameter, and the phase plane parameters that affect the control accuracy can be adaptively adjusted according to the characteristic parameter to achieve the control goal.
[0072] Referring to Example 1, the phase plane parameters are designed. With the decrease of the longitudinal relative distance, the requirement of lateral position control accu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More