

Robot control software module partitioning method
A technology for controlling software and robots, which is applied in the field of robotics and can solve the problems of lack of quantitative evaluation model and difficulty in obtaining division results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107]The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
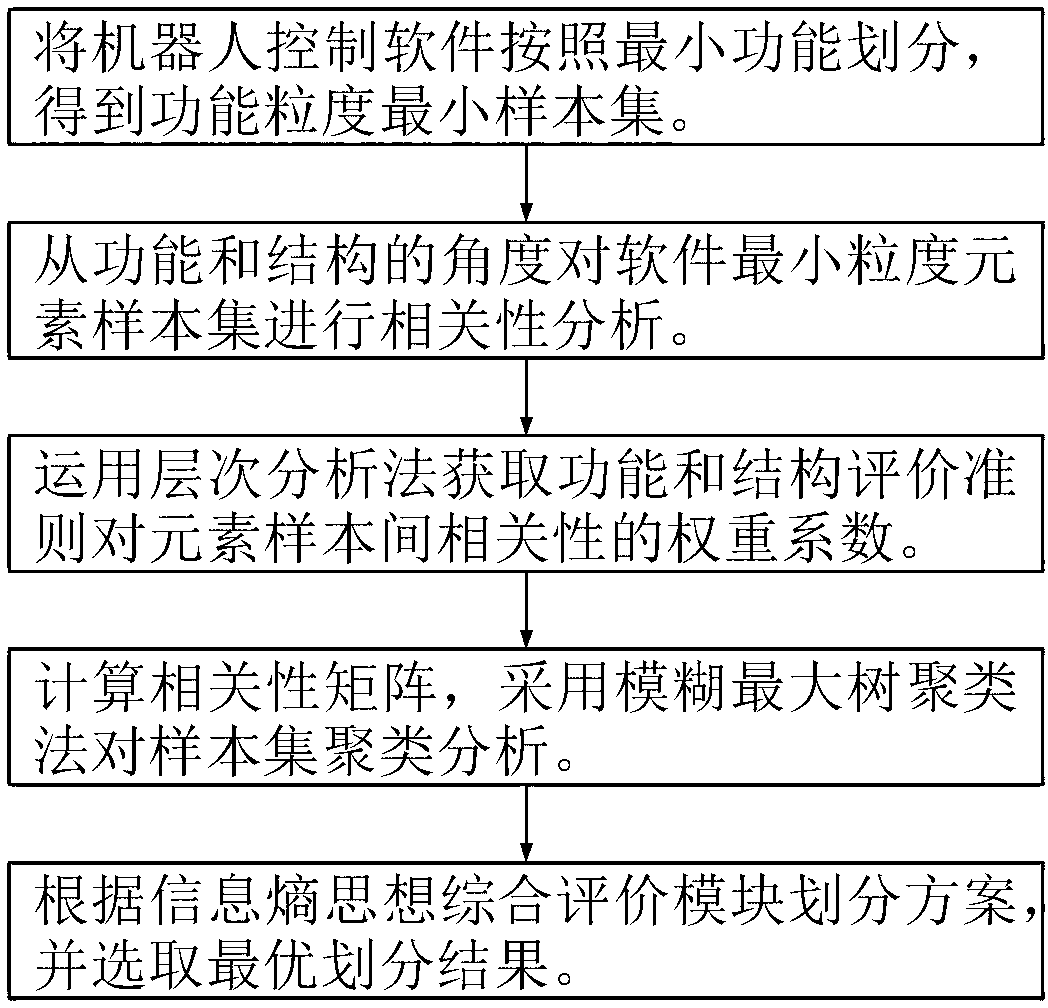
[0108] The flow chart of the method involved in the present invention is as attached figure 1 shown, including the following steps:
[0109] Step 1: Divide the robot control software according to the smallest function to obtain the element sample set with the smallest functional granularity.
[0110] Step 2: Carry out correlation analysis on the minimum granularity element sample set of software from the perspective of function and structure.
[0111] Functional independence is an important characteristic of a module. When dividing robot control software modules, those elements that achieve the same function are gathered together to form a module, and the functions are kept independent to avoid the phenomenon of functional coupling, which helps to improve the module. Functional independence and system stability. The functional correlation eva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More