

Wheel-arm-hybrid obstacle surmounting robot with radial telescopic wheels
A hybrid and robotic technology, applied in the direction of claw arms, manipulators, manufacturing tools, etc., can solve the problems of poor adaptability to complex terrain, lack of independent operation ability, etc., achieve good flexibility and adaptability, enhance more barrier performance, compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation of this patent will be described below in conjunction with the accompanying drawings of this patent.
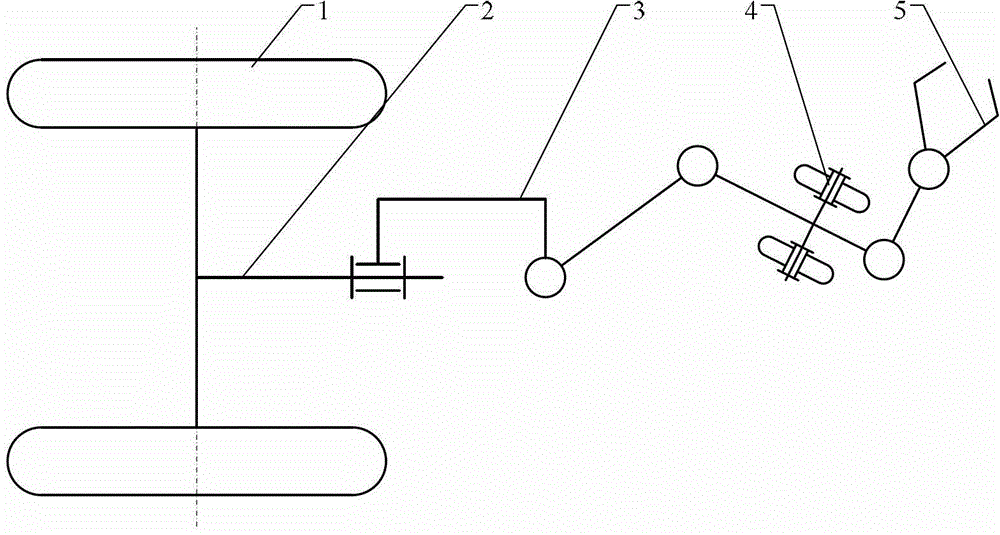
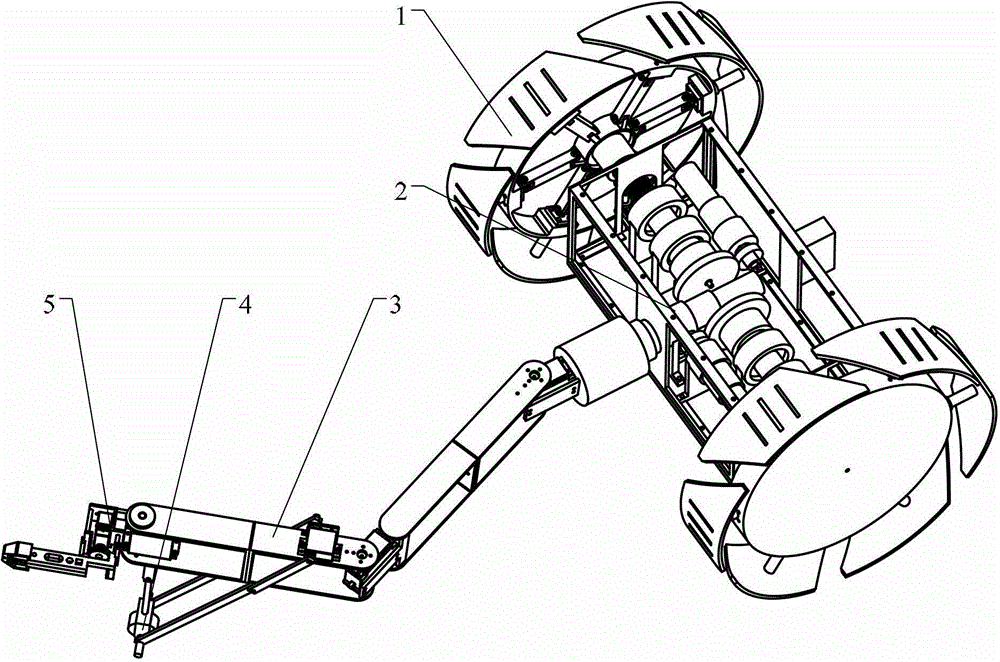
[0021] like figure 1 , figure 2 As shown, a wheel-arm hybrid obstacle-climbing robot with radially telescopic wheels consists of a driving wheel 1 , a car body 2 , a mechanical arm 3 , an auxiliary wheel 4 , and a manipulator 5 . The two driving wheels 1 are symmetrically arranged on the left and right sides of the vehicle body 2, and are connected with the vehicle body 2 to form a rotating pair. 3-7, the manipulator 5 is fixedly connected to the wrist joint servo 3-8 of the manipulator 3 through the connecting plate 5-3.
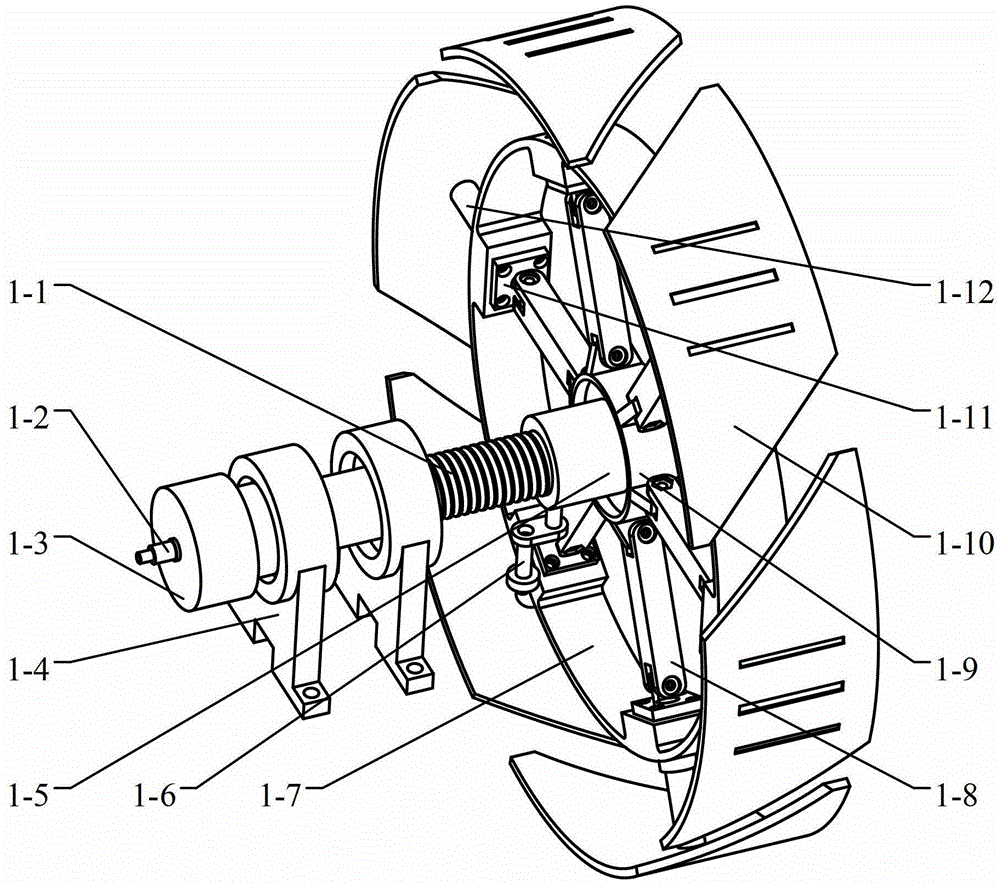
[0022] like image 3 As shown, the drive wheel 1 includes an outer shaft 1-1, an inner shaft 1-2, a clutch 1-3, a bearing seat 1-4, a nut 1-5, a guide rod 1-6, an inner rim 1-7, Wheel spoke push rod 1-8, wheel spoke push seat 1-9, wheel rim inclined block 1-10, linear bearing 1-11, wheel spoke rod 1-12.
[0023] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More