

High-precision tracking method applied to non-engine maneuvering target
A maneuvering target, high-precision technology, applied in the field of target tracking, can solve the problems of real-time modeling without non-engine target motion characteristics, uncertainty of observation data, and inability to achieve good tracking results when tracking non-engine maneuvering targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0074] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
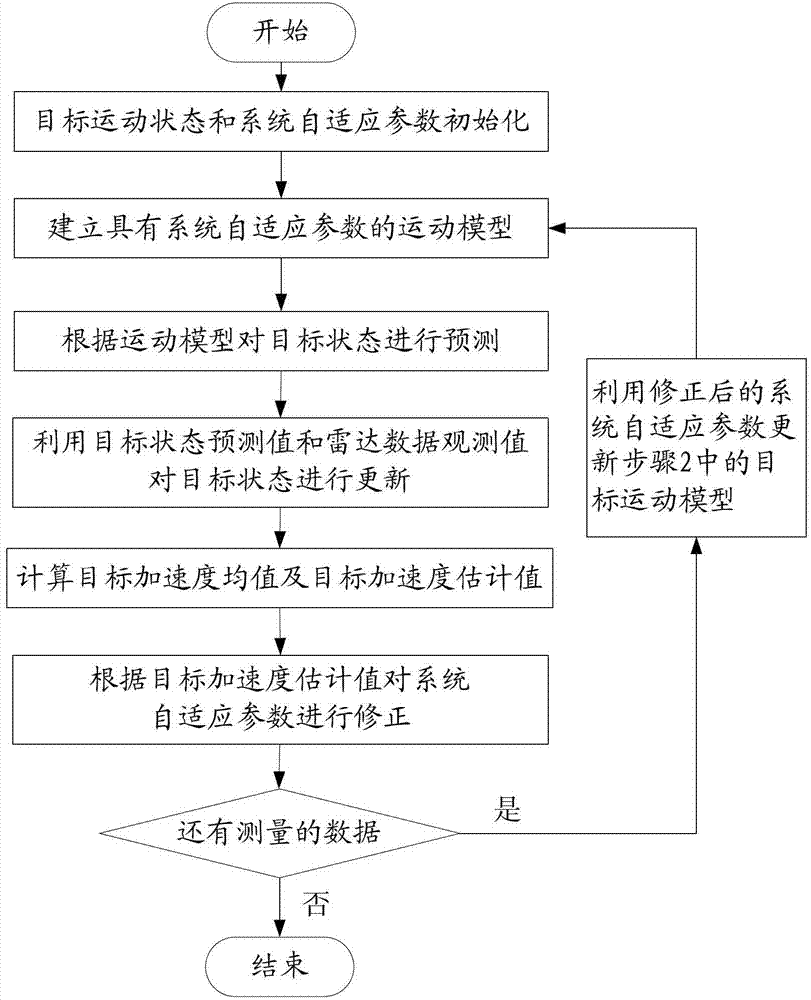
[0075] Such as figure 1 As shown, a high-precision tracking method suitable for non-engine maneuvering targets includes the following steps:
[0076] Step 1: Target motion state and system adaptive parameter initialization
[0077] 1.1 Set the initial value of the state is a 3-dimensional vector of all 0 columns, and the dimension is the dimension of the state vector in the system model,
[0078] 1.2 Initial value of system adaptive parameter α=α 0 and Take any positive number, in this embodiment α 0 value Take the value 3,
[0079] 1.3 Initial value of autocorrelation function r 0 (0) and r 0 The initial value of (1) is taken as r 0 ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More