

Multi-robot path planning and coordination collision prevention method based on fuzzy logic
A path planning and multi-robot technology, applied in two-dimensional position/channel control, comprehensive factory control, comprehensive factory control, etc., can solve problems such as incompetence of a single robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
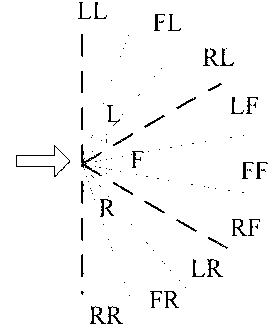
[0045] Robots generally have a vision system equipped with several laser sensors or sonar sensors. The working principle of the sensor is to use laser or sonar to scan the 180-degree range ahead. If obstacles are encountered within this range, the laser sensor can read After obtaining the distance information of obstacles, the robot can use this distance information to analyze the entire environment. This embodiment uses this distance information to analyze and then avoid obstacles. In addition, the robot can read the coordinates of the current position and the current orientation angle. This embodiment uses the function of the robot to calculate the difference between the current orientation and the target orientation, and in turn realizes the target-oriented constraints.
[0046] Such as figure 1 As shown, this embodiment provides a metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More