End effector capable of achieving space manipulator self crawling and load operation
A technology of end effector and space manipulator, which is applied in the field of robotics, can solve the problems of small capture tolerance, insufficient, and inability to realize mechanical power output, etc., and achieve the effect of large capture tolerance, large capture preload, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
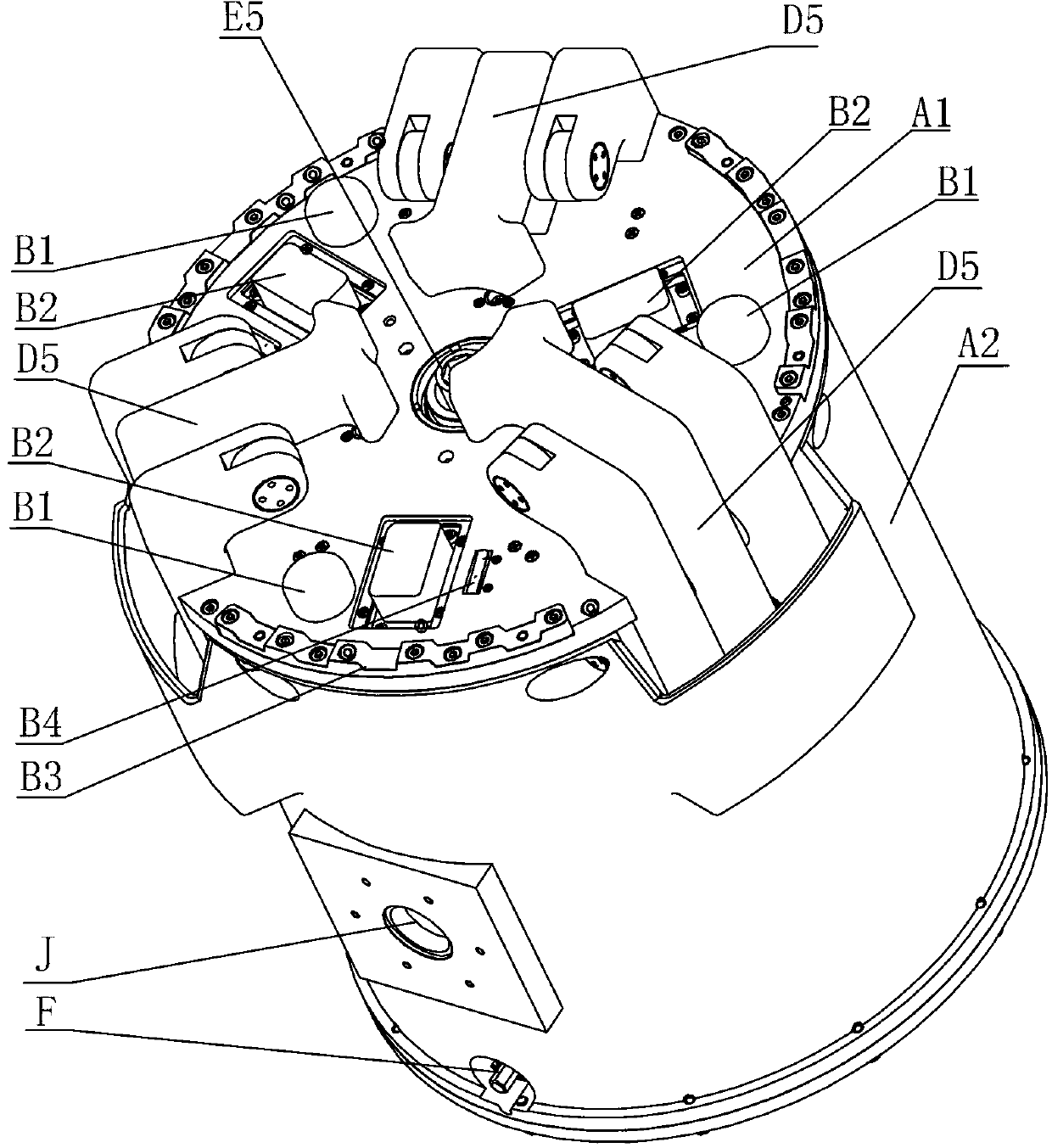
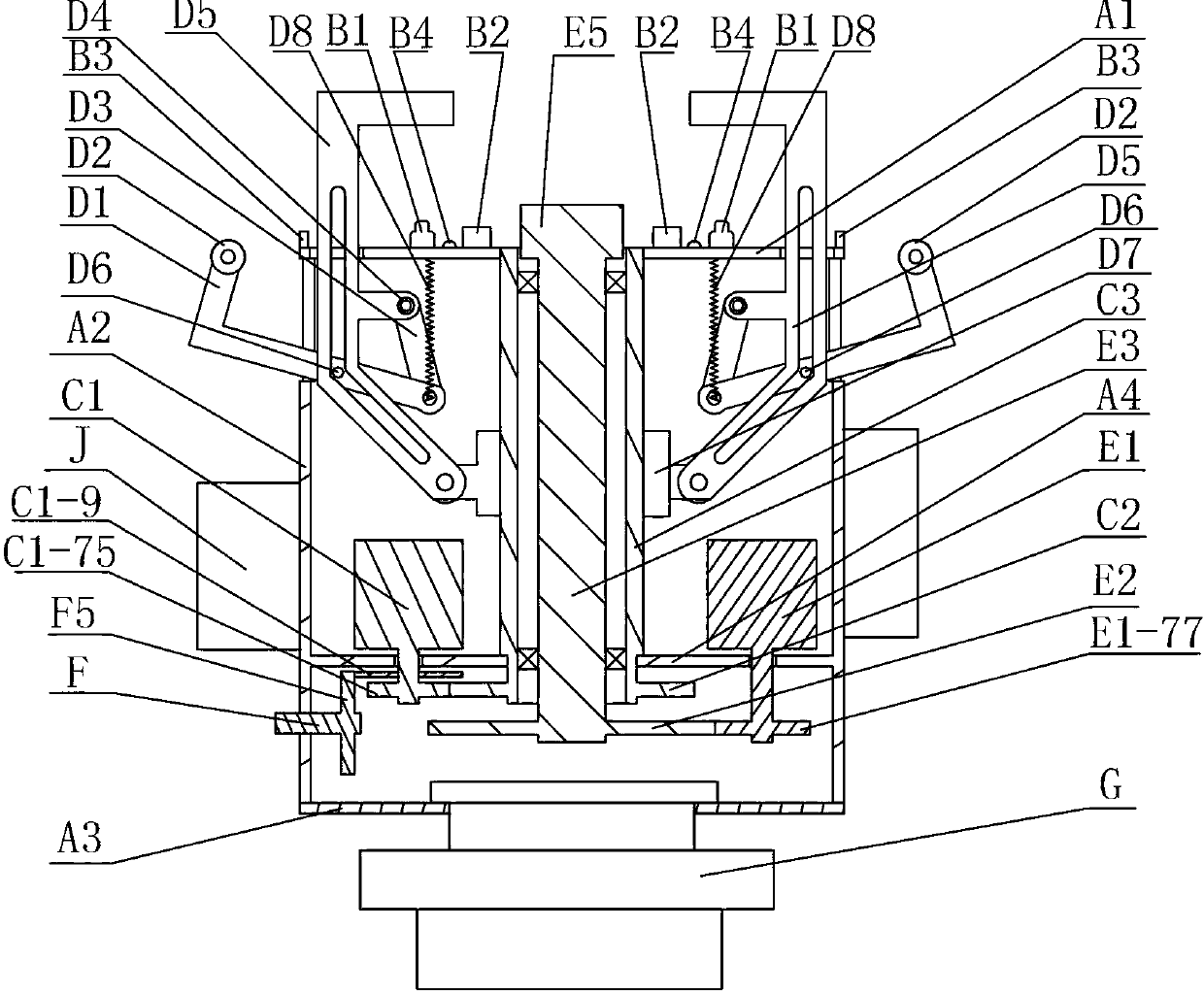
[0013] Specific implementation mode one: combine Figure 1 to Figure 8 This embodiment is described. An end effector that realizes self-crawling and load operation of a space manipulator in this embodiment includes a support and protection device, an engaging docking device, a capture and lock power drive device, a capture and lock device, and a power output drive device. ;
[0014] The support and protection device includes a cover plate A1, a support shell A2, a partition A4 and a bottom plate A3; the support shell A2 is a cylindrical shell, the cover plate A1 is connected to the upper end of the support shell A2, and the base A3 Installed on the lower end of the supporting shell A2, a partition A4 is connected to the inner wall of the supporting shell A2 between the cover plate A1 and the bottom plate A3;
[0015] The engaging and docking device includes three positioning columns B1, three electrical connectors B2, three coupling racks B3 and three contact switches B4, and...
specific Embodiment approach 2
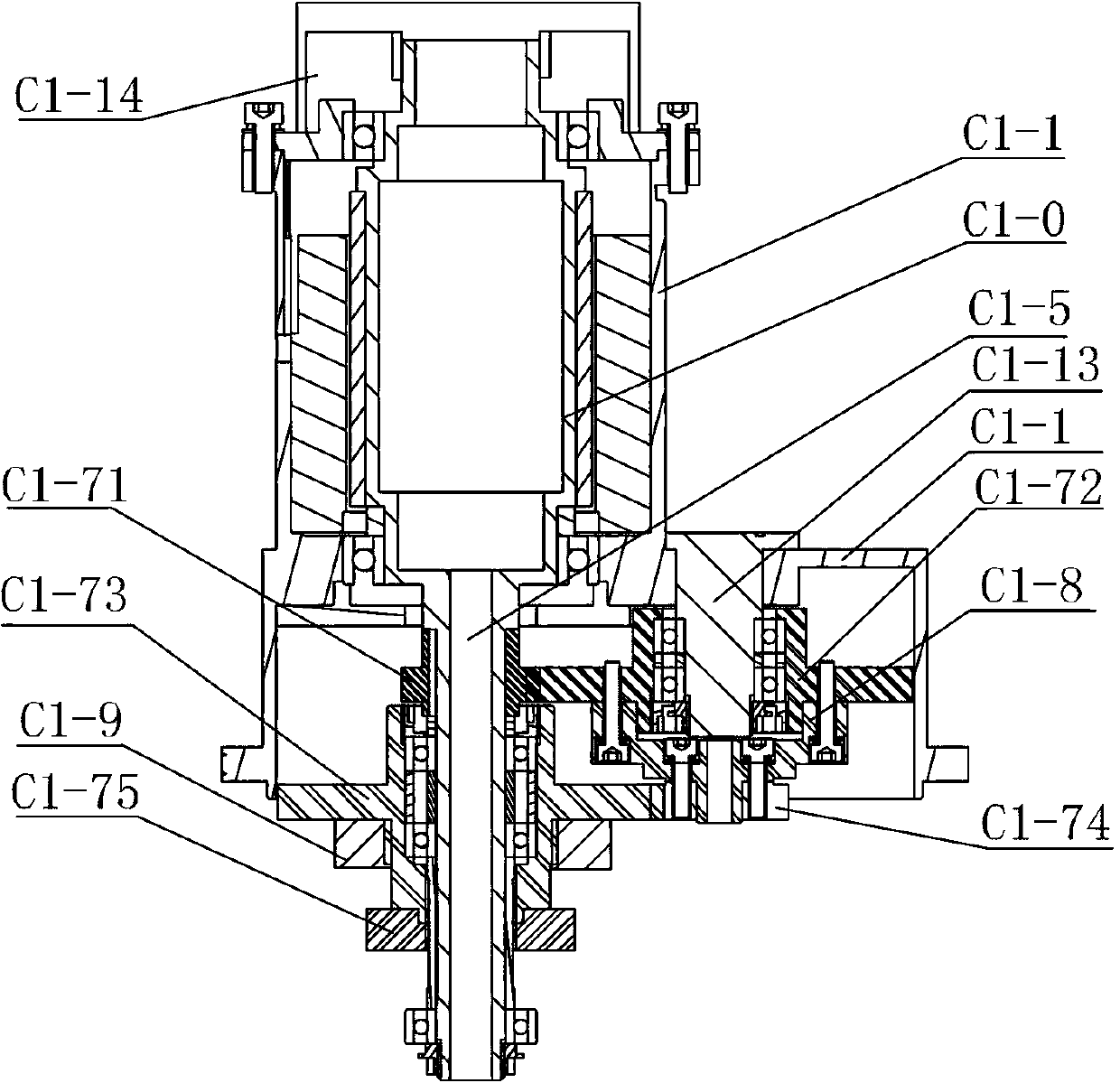
[0023] Specific implementation mode two: combination Figure 2-Figure 3 To illustrate this embodiment, the input transmission mechanism C1 in this embodiment includes the input transmission mechanism C1 including an input motor C1-0, a first spur gear C1-71, a second spur gear C1-72, a third spur gear C1- 73. The fourth spur gear C1-74, the fifth spur gear C1-75, the first connector C1-8 and the first gear shaft C1-13, the transmission shaft C1-5 of the input motor C1-0 is vertically set, and the transmission The first spur gear C1-71 is fixedly installed on the shaft C1-5, the second spur gear C1-72 is installed on the first gear shaft C13 and the two are connected in rotation, and the first gear shaft C13 is fixedly installed on the input motor C1-0 The third spur gear C1-73 is installed on the transmission shaft C1-5 and the two are connected in rotation. The first spur gear C1-71 meshes with the second spur gear C1-72, and the second spur gear C1-72 The spur gear C1-72 is...
specific Embodiment approach 3
[0025] Specific implementation mode three: combination image 3 Referring to this embodiment, the input transmission mechanism C1 in this embodiment further includes a first power-off brake C14, and the first power-off brake C14 is respectively connected to the first housing C1-1 and the transmission shaft C1-5. The tail of the drive shaft C1-5 in this embodiment is provided with a first power-off brake C1-14, which can provide emergency braking for the end effector of the present invention in the event of a power failure to avoid accidents. occurrence or damage to components. Others are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More