

Method for autonomous localization of unmanned motorized vehicles
An unmanned and vehicle technology, applied in motor vehicles, vehicle position/route/altitude control, two-dimensional position/airway control and other directions, can solve problems such as vehicle parking, vehicles can no longer be positioned, and achieve measurement data density. improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
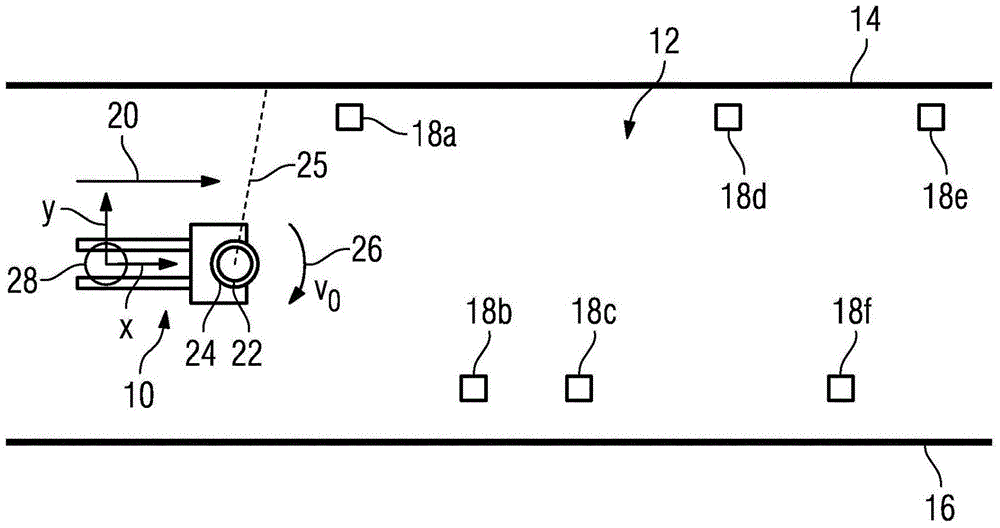
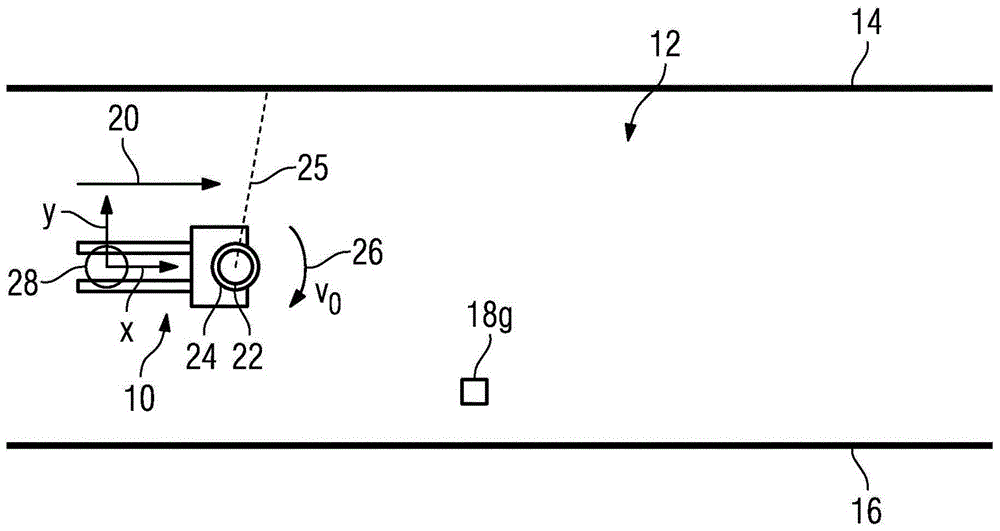
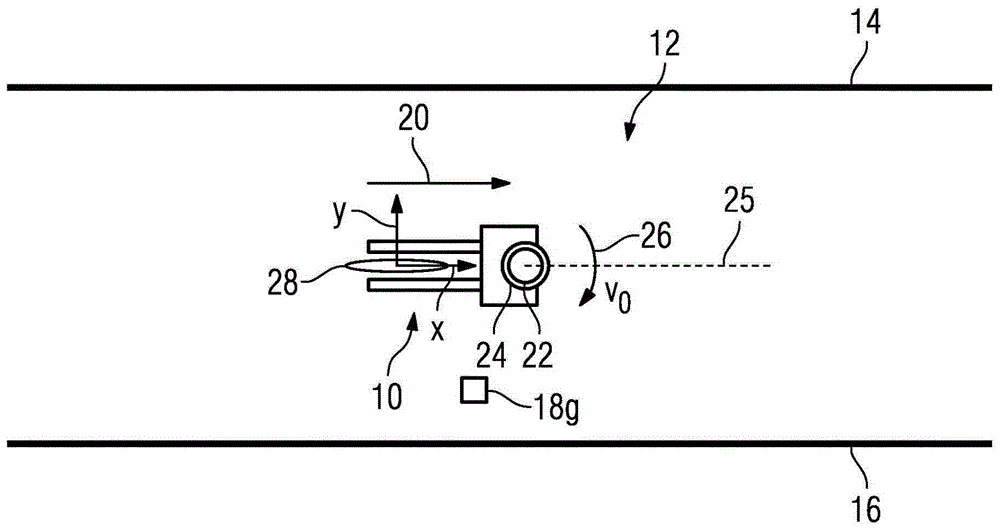
[0019] figure 1 Shown is a schematic plan view of an unmanned motorized vehicle 10 , which is positioned using an autonomous localization method within a known environment 12 , which is delimited here by two walls 14 and 16 arranged opposite one another. . Vehicle 10 is positioned by means of natural landmarks in the form of walls 14 and 16 as well as existing geometrical structures 18 a, b, c, d, e, f in environment 12 , such as pipes, beams, columns or the like. When vehicle 10 is moving in the direction of movement indicated by arrow 20 , these natural landmarks 14 , 16 , 18 a to f are detected by means of a distance-measuring sensor 22 arranged on vehicle 10 , which is a laser scanner. The sensor 22 is arranged on a sensor motor 24 such that its measuring plane 25 can be pivoted about a pivot axis (not shown in detail) by the drive 24 of the sensor motor. By deflecting the sensor 22 , as indicated by the arrow 26 , the environment 12 can correspondingly be scanned three-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More