

Wheeled-tracked-legged composite type mobile robot
A mobile robot and composite technology, applied in the field of mobile robots, can solve the problems of poor flexibility and stability, poor obstacle-surpassing ability, and low carrying capacity, and achieve the effect of simple structure, strong climbing, and strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
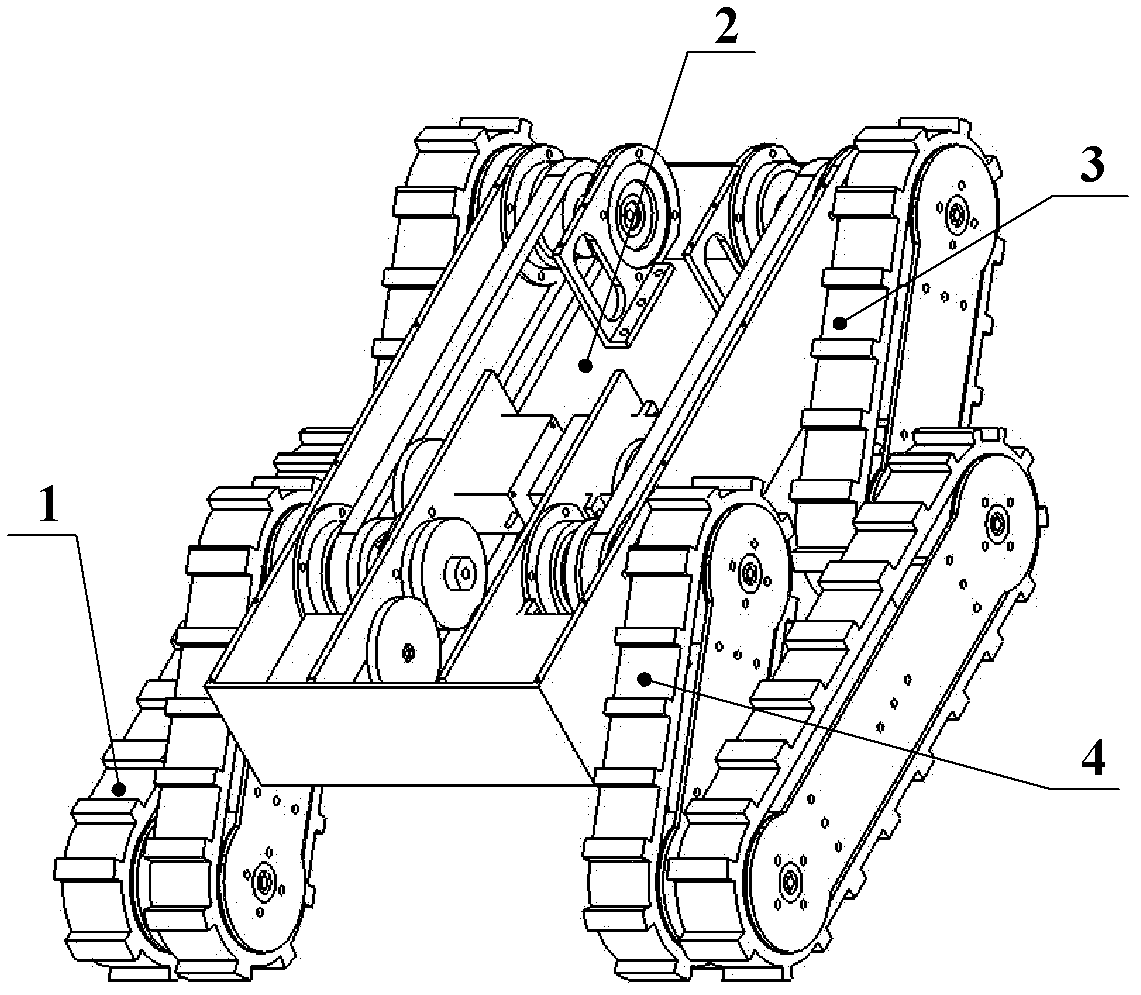
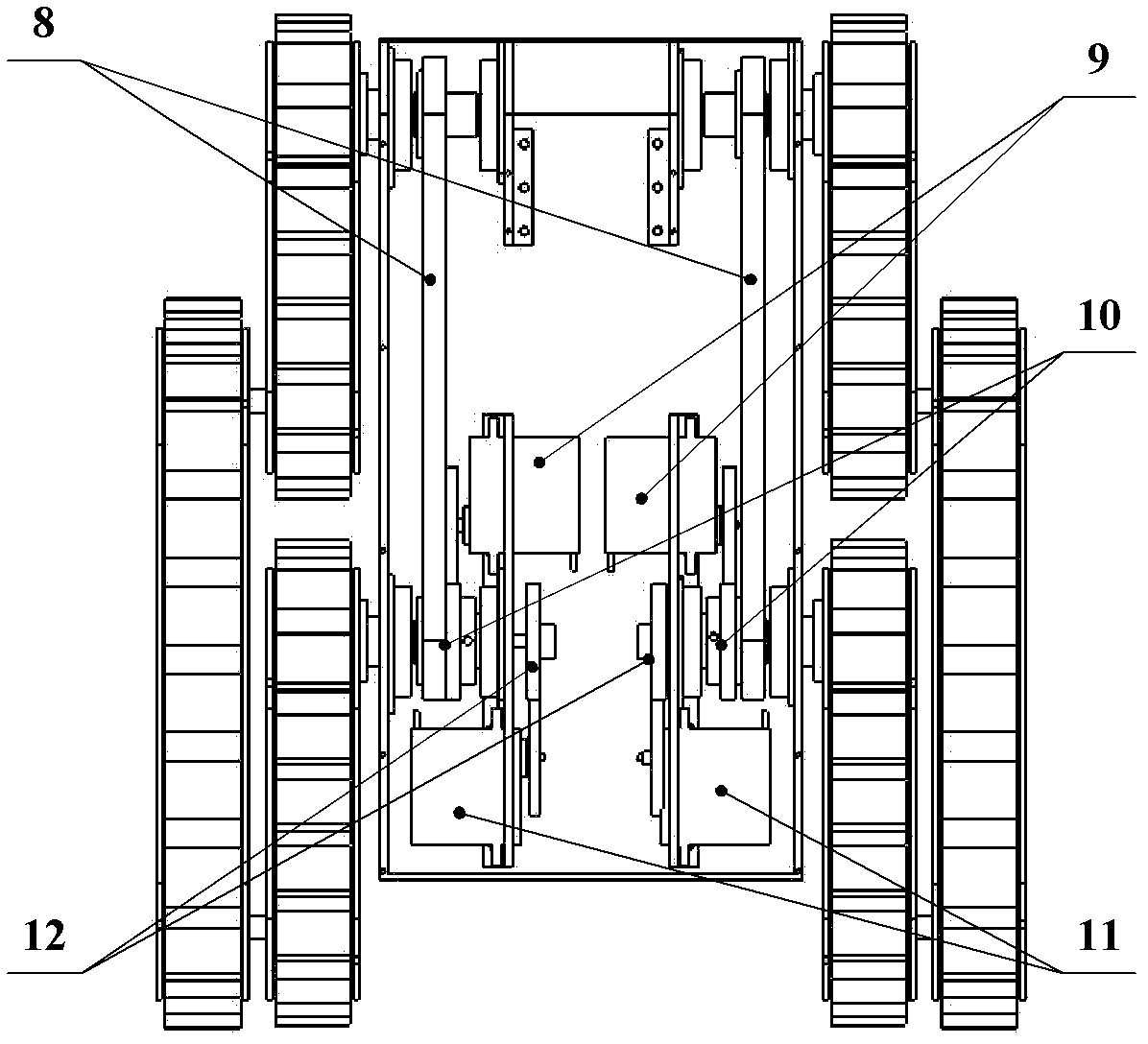
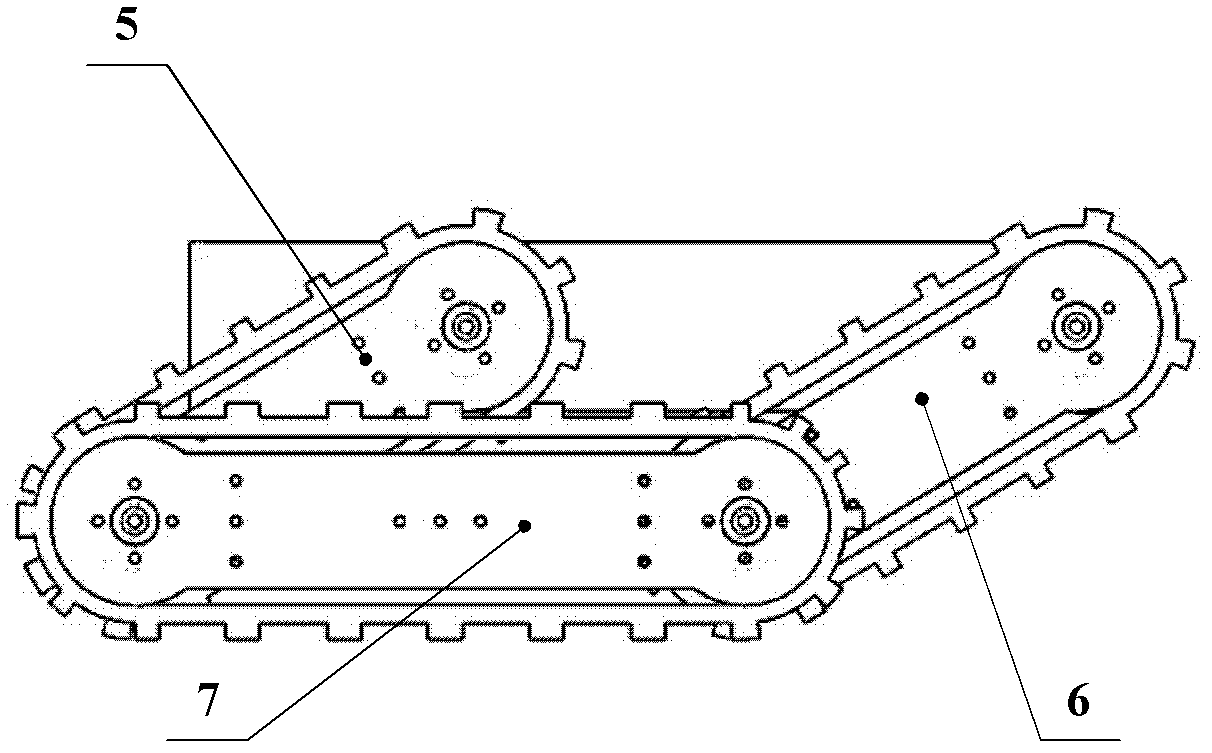
[0016] see Figure 1-Figure 2 , the wheel-track-leg compound mobile robot adopts six tracks arranged on both sides, the front swing arm track 3, the rear swing arm track 4 and the main track 1 and the two sides of the car body 2 are respectively combined into a parallelogram linkage mechanism. Two crawler drive motors 11 are placed at the rear end of the vehicle body 2 to drive the front swing arm crawler 3 , the rear swing arm crawler 4 and the main crawler 1 through gears 12 and track shaft transmission connection, and the two swing arm drive motors 9 and crawler drive motor 11 They are arranged staggeredly in the middle of the car body 2, and transmit the power to the front swing arm track frame 6 and the rear swing arm track frame 5 through the gear 10 and the synchronous belt 8 respectively to realize the rotation of the swing arm track, so that the main track frame 7 swings along with the front swing arm. The arm crawler frame 6 and the rear swing arm crawler frame 5 gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More