

City environment robot navigation method based on multi-layer probabilistic terrain
A technology of urban environment and navigation method, applied in the direction of instruments, image data processing, 3D modeling, etc., can solve the problems of insufficient expression of urban environment, lack of fault tolerance and robustness, weak autonomous navigation ability, etc., and achieve good economic benefit, ensure real-time performance, and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
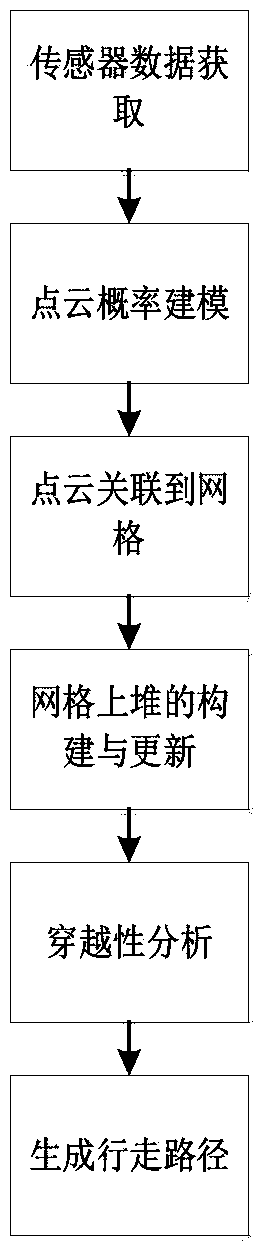
[0021] figure 1 The overall flowchart of the urban environment robot navigation method based on probabilistic multi-layer terrain proposed by this patent, the specific steps of the algorithm are as follows:
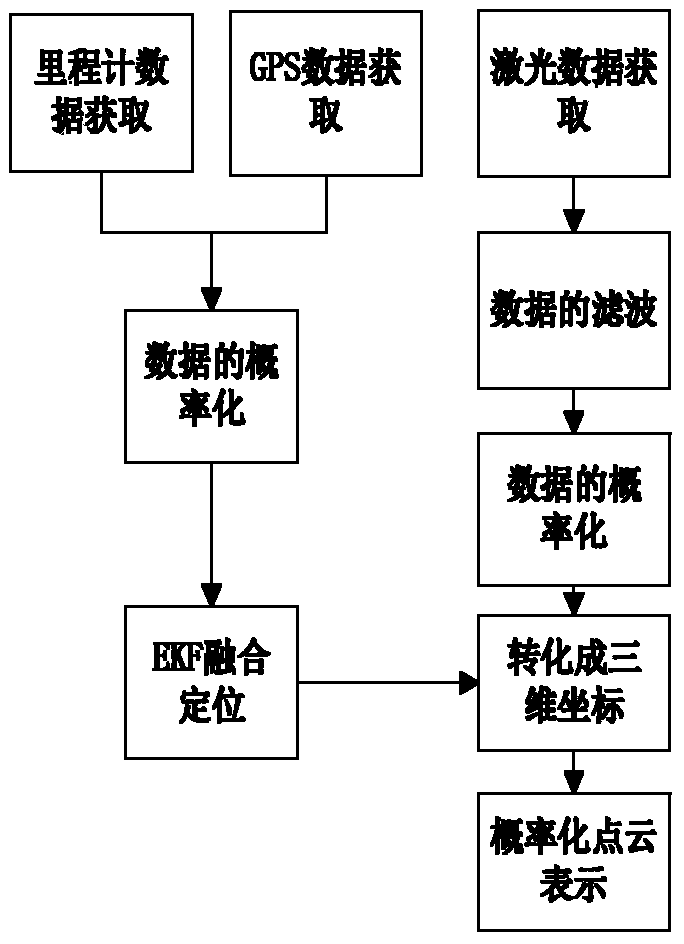
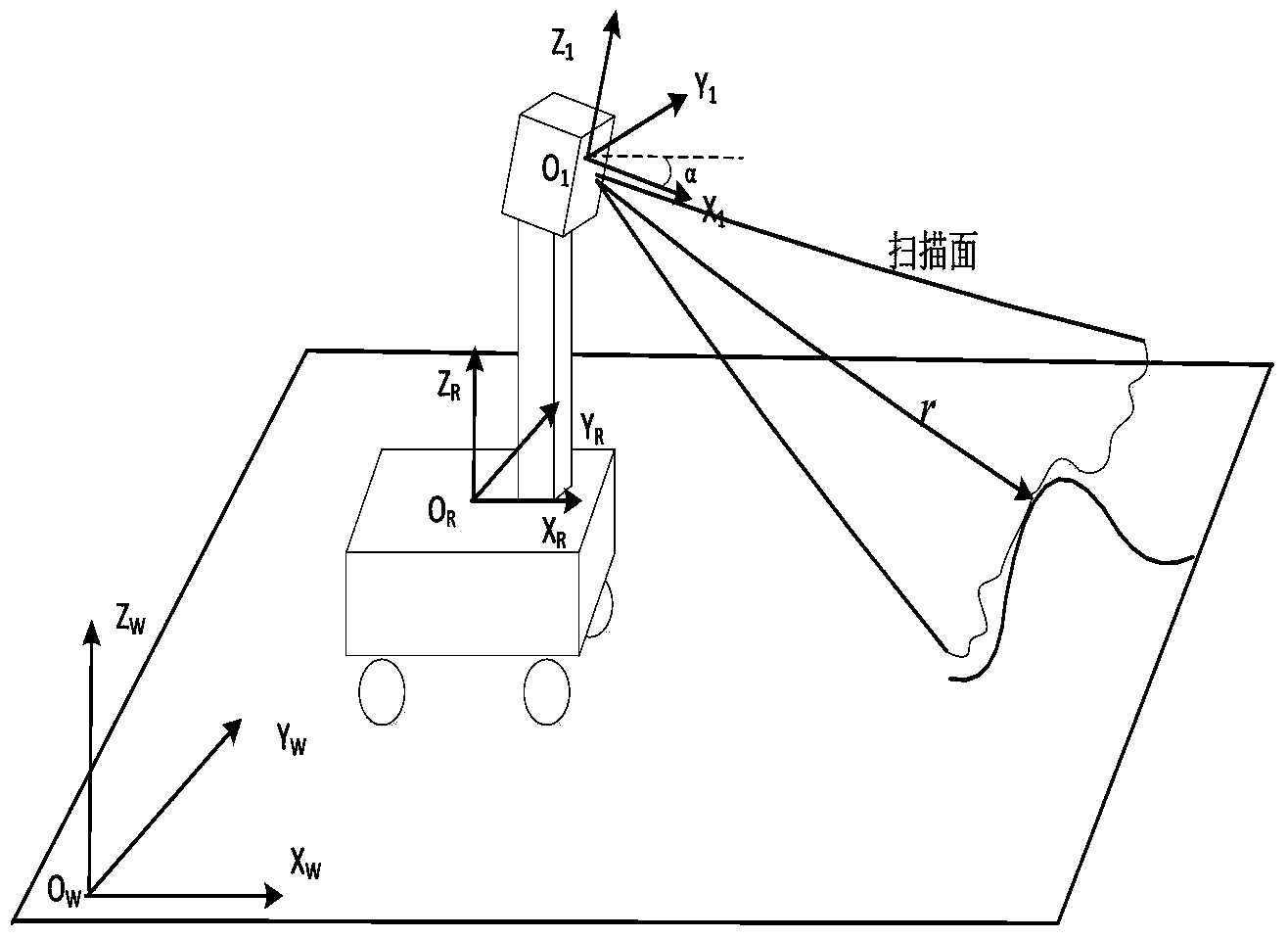
[0022] 1. Acquisition of 3D terrain information and generation of probabilistic point clouds
[0023] The acquisition of three-dimensional environmental data is the prerequisite for subsequent terrain modeling. First, the distance information of the surrounding environment is obtained through a two-dimensional laser sensor; secondly, the laser measurement data, odometer and GPS data are probabilized through a Gaussian model; and then the Kalman The filtering method uses the odometer and GPS data to fuse and position the robot to obtain the global coordinates of the robot's current position; finally, by combining the current global coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More