

Multifunctional abdominal-cavity minimally invasive surgery tool
A minimally invasive surgery and multi-functional technology, applied in the field of medical devices, can solve the problems of complicated tool replacement and maintenance procedures, difficult practical application, and difficult precision surgery, so as to shorten the operation preparation time and process time and meet the requirements of operation Precise, Versatile Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
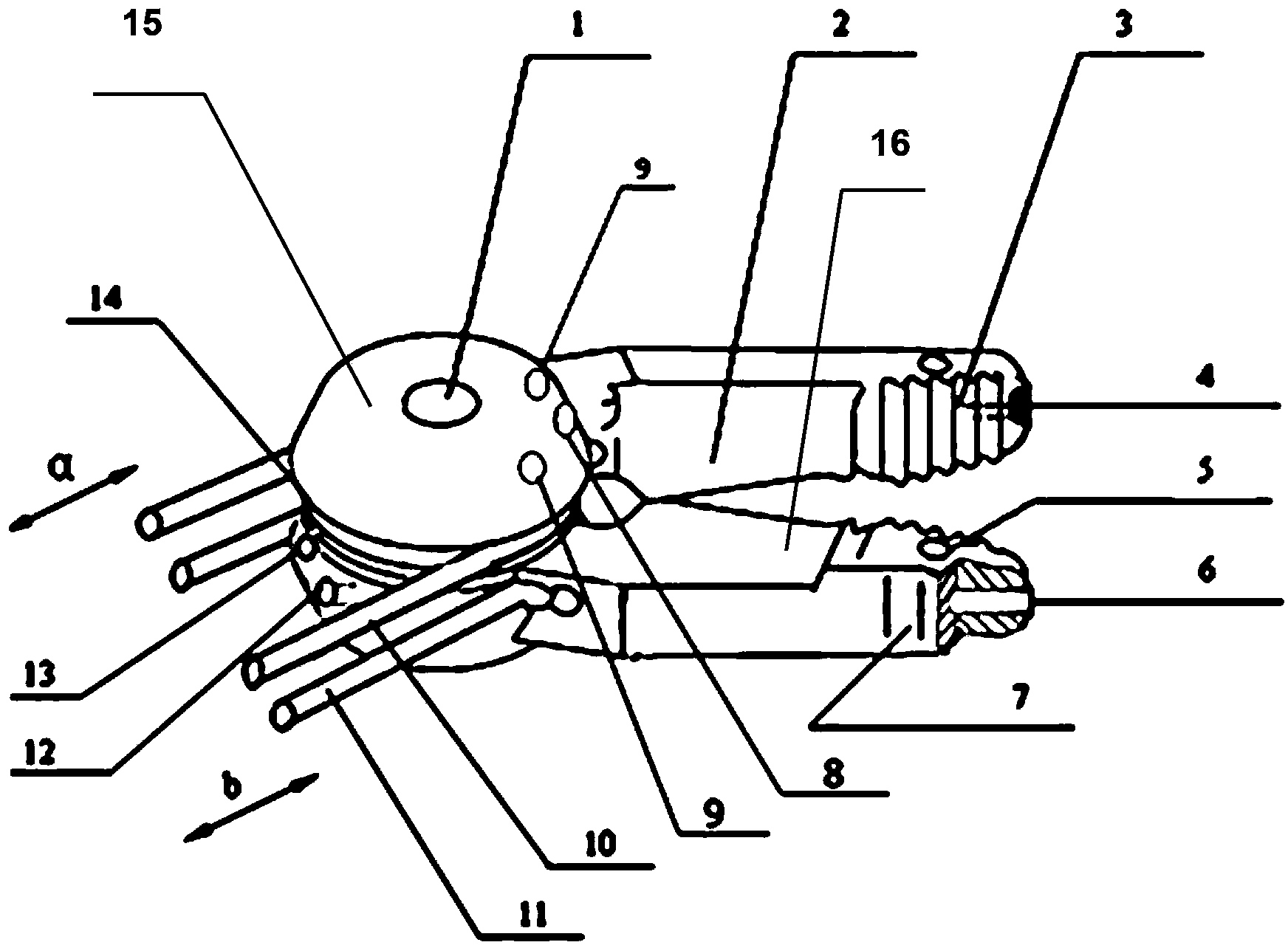
[0025] The multifunctional abdominal minimally invasive surgery tool described in the present invention can be connected with different actuators, such as surgical robot arms, to complete abdominal minimally invasive surgery. In one body, it reduces the trouble of changing tools during the operation, shortens the operation time, and reduces the surgical wound of the patient. It is suitable for minimally invasive abdominal surgery.
[0026] Such as figure 1 As shown, the m...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More