

Spherical robot slope motion control method based on fuzzy sliding mode controller
A spherical robot, motion control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of poor anti-interference ability and large dependence on modeling accuracy, to improve robustness, enhance Anti-interference ability, accurate control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings, but the embodiment of the present invention is not limited to the embodiments.
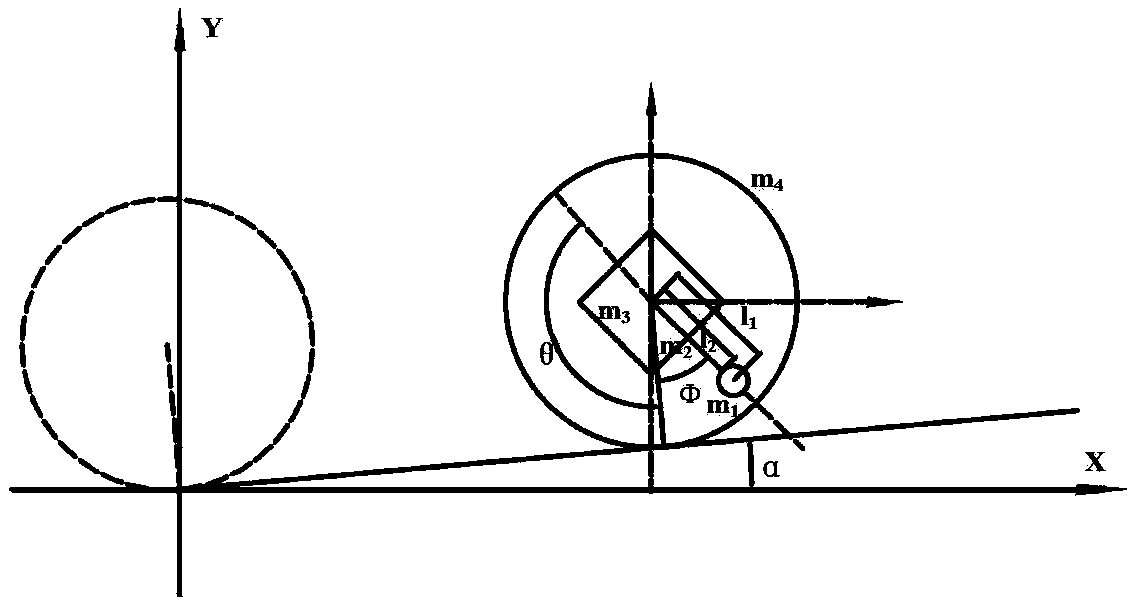
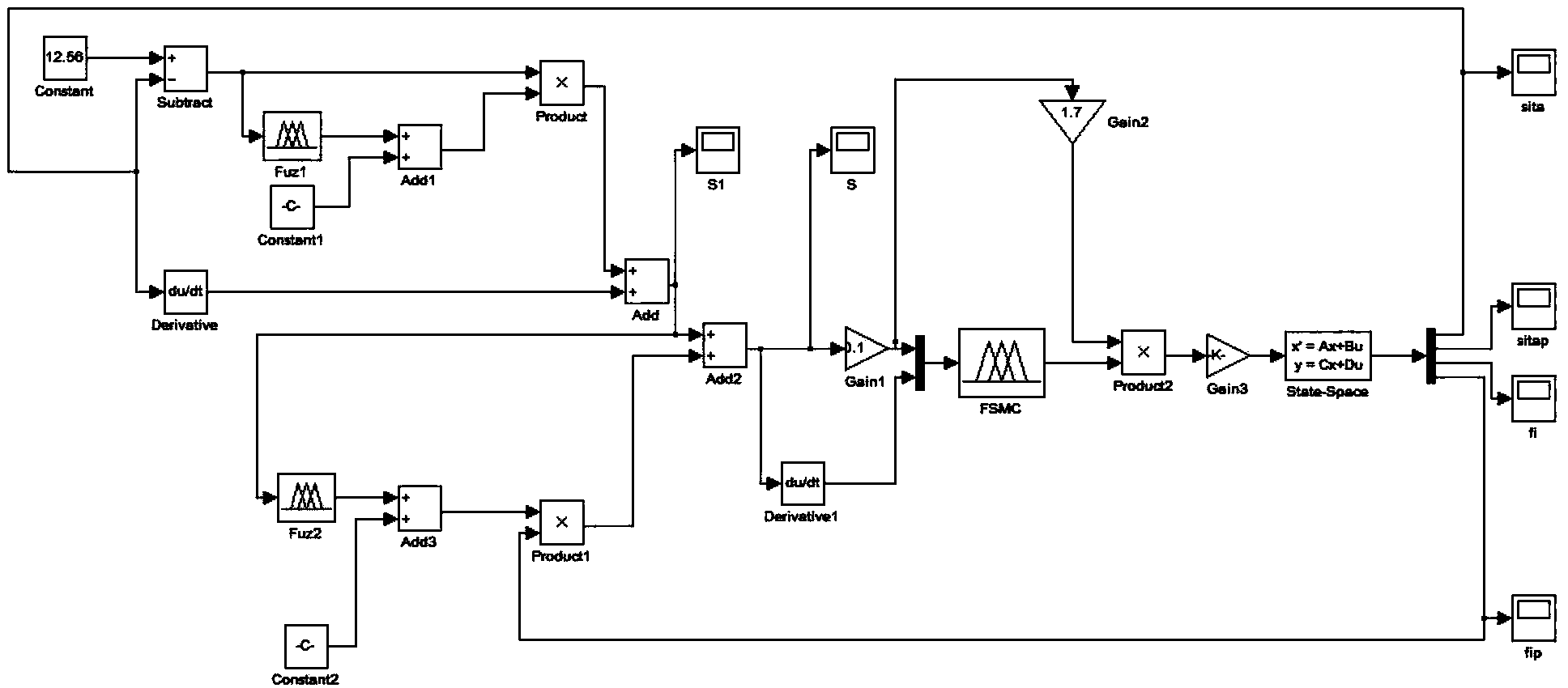
[0033] Such as figure 1 Shown in Fig. 3, the present invention comprises the following steps:
[0034] S1. The attitude information of the spherical robot on the slope surface measured by the inertial measurement device is used to obtain the current state information of the re-swing of the spherical robot, and the state information of the re-swing includes the swing angle parameter of the re-swing and the swing angular velocity parameter of the re-swing; The position and speed information of the spherical robot on the slope is measured by the odometer and the photoelectric encoder. The position and speed information of the spherical robot on the slope include the motion speed parameter of the spherical robot and the motion distance parameter of the spherical robot; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More