

Submarine AGV movement transferring robot
A handling robot and latent technology, which is applied in the fields of intelligent logistics and transportation and vehicle engineering, can solve the problems of insufficient scope in terms of economy and practicability, and achieve the effects of low cost, high integration and strong versatility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
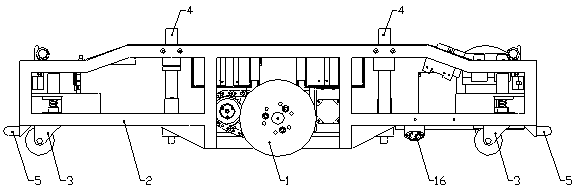
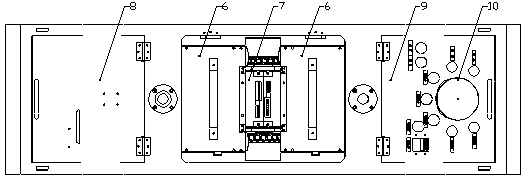
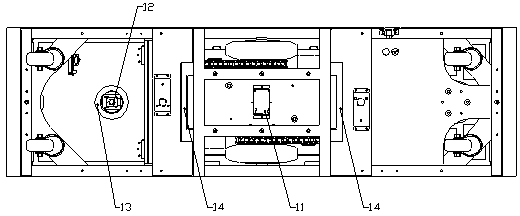
[0030] like figure 1 , figure 2 , image 3 , Figure 4 As shown, a latent AGV mobile handling robot, the AGV car body includes an AGV drive assembly 1, a car body frame 2, auxiliary wheels 3, a control system module 7, a rear panel 8 and an operation panel 9, and the operation panel 9 and The rear panel 8 is arranged on the front end of the car body frame 2 respectively, and a camera 12 and a light source 13 are installed below the AGV rear panel 8 . The driving wheel of the AGV drive assembly 1 is a solid wheel, which drives and rotates the AGV car body through a bias motor reducer and a chain transmission device, so as to realize the forward, backward, left and right turns of the AGV body. The motor of the AGV automatic lifting traction mechanism 4 is a linear electric push rod, and the AGV automatic lifting traction mechanism 4 realizes the automatic rise and fall of the lifting pin of the AGV car body by controlling its electric push rod. When the lifting pin is in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More