

Two-degree-of-freedom upper limb rehabilitation training robot system
A robot system and rehabilitation training technology, applied in the field of rehabilitation robots, can solve the problems of large occupation space, large driving force, large weight, etc., and achieve the effect of increasing the training range, easy control, and stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
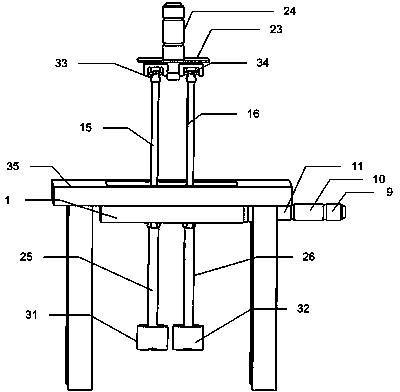
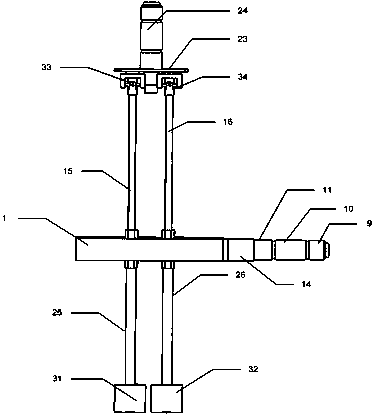
[0024] Such as figure 1 As shown, a two-degree-of-freedom rehabilitation training robot system includes a rehabilitation robot mechanism, a mechanism support platform 35 and an elbow support frame, and a rehabilitation robot mechanism is fixed in the middle of the mechanism support platform, and the rehabilitation robot mechanism includes a mechanism outer frame 1. A double parallel link mechanism for two degrees of freedom movement, a first drive mechanism for driving the double parallel link mechanism to move in the x direction, and a second drive mechanism for driving the double parallel link mechanism to move in the y direction .
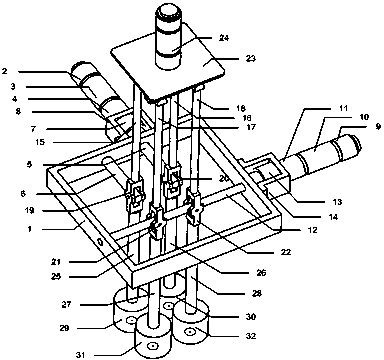
[0025] Such as figure 2 As shown, the double parallel linkage mechanism is composed of four connecting rods 15, 16, 17, 18, and the lower ends of the connecting rods are respectively connected to the counterweight shafts 25, 26, 27, 28 through connecting pieces 19, 20, 21, 22 , the counterweight shaft is provided with threads for connecting c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More