

Method for controlling shallow water observation-level mini underwater robot
A kind of underwater robot, mini technology, applied in the program control of sequence/logic controller, electrical program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
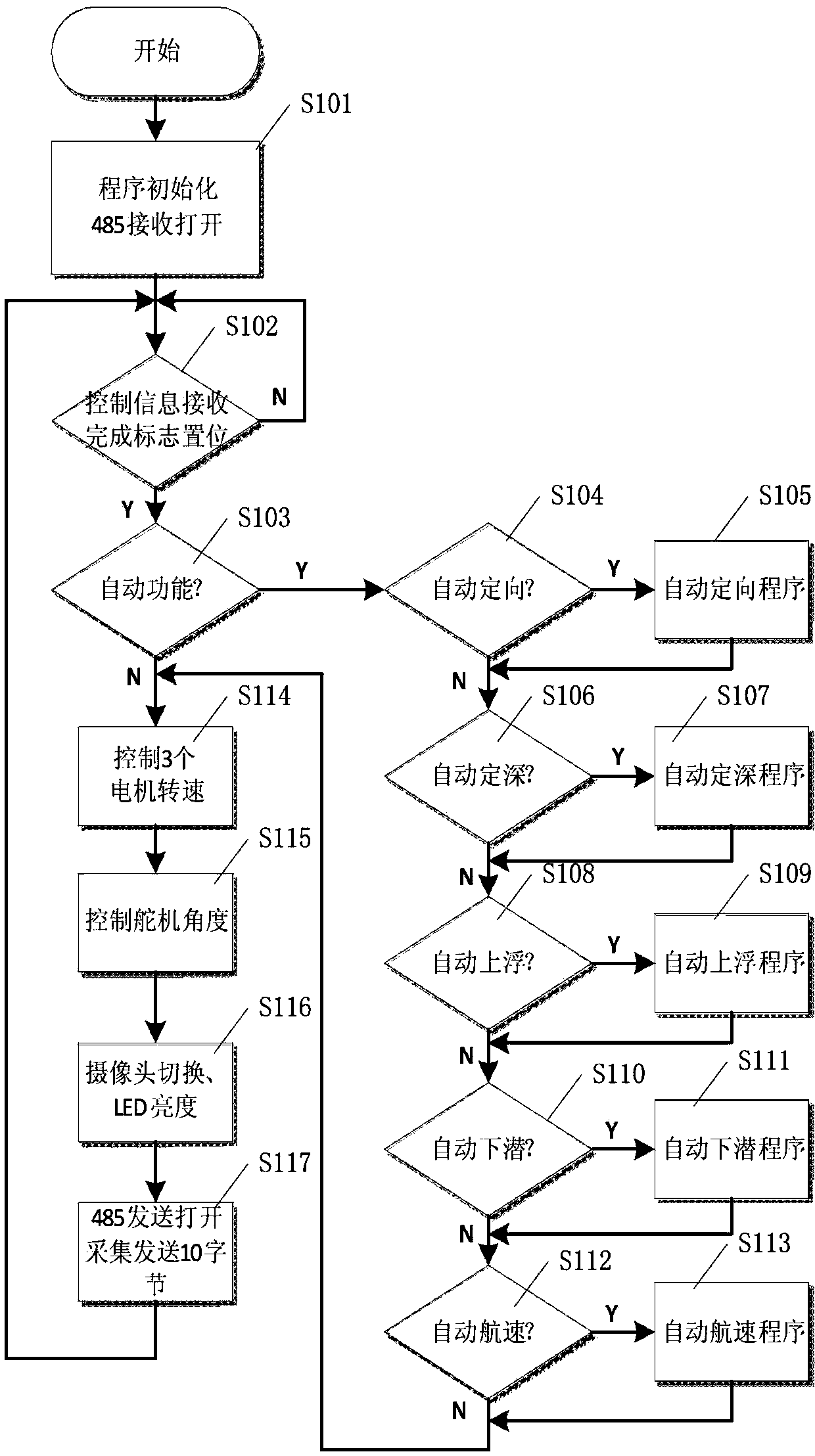
[0105] figure 1 It shows the flow of the method for controlling the shallow water observation level mini underwater robot provided by the present invention. For ease of illustration, only the parts relevant to the present invention are shown.
[0106] The method for controlling the shallow water observation level mini underwater robot of the present invention, the method for controlling the shallow water observation level mini underwater robot comprises the following steps:
[0107] Step 1, the program is initialized, and the 485 communication module receives and opens;
[0108] Step 2, judge whether the reception of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More