

Planetary entering branch autonomous navigation method based on radio tracking measurement
A tracking measurement and autonomous navigation technology, applied in the field of deep space exploration, can solve the problems of limited number of planetary orbiters and difficulty in ensuring real-time autonomous navigation, and achieve the effects of improving real-time performance, improving accuracy and convergence speed, and high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to better illustrate the purpose and advantages of the present invention, the content of the invention will be further described below in conjunction with the accompanying drawings and embodiments.
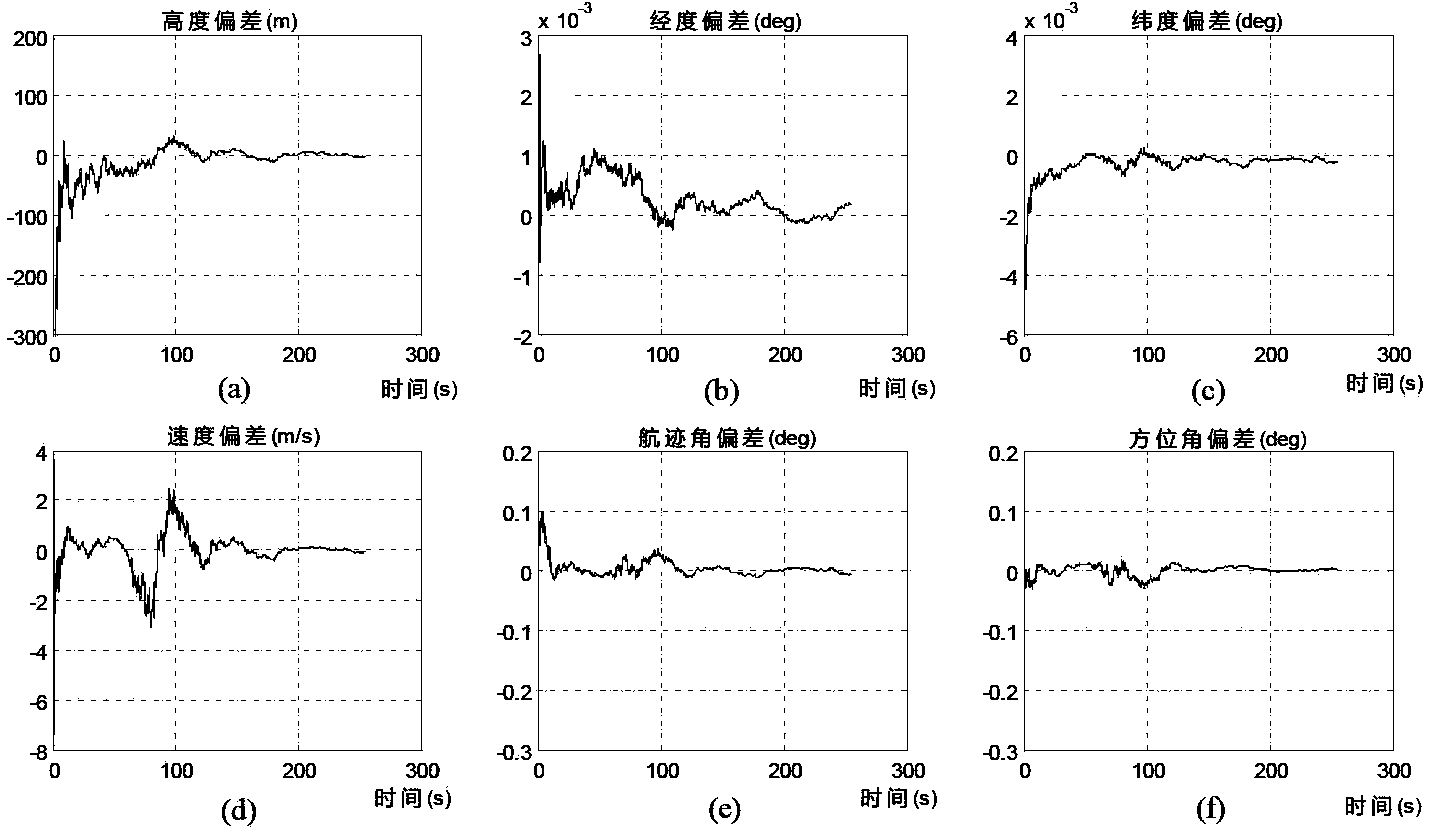
[0038] This example is aimed at the autonomous navigation scheme based on radio measurement in the entry stage of Mars, using the radio measurement information between the probe, a Mars orbiter and three Mars surface radio beacons, combined with the extended Kalman filter for filter calculation, to achieve High-precision real-time autonomous navigation.
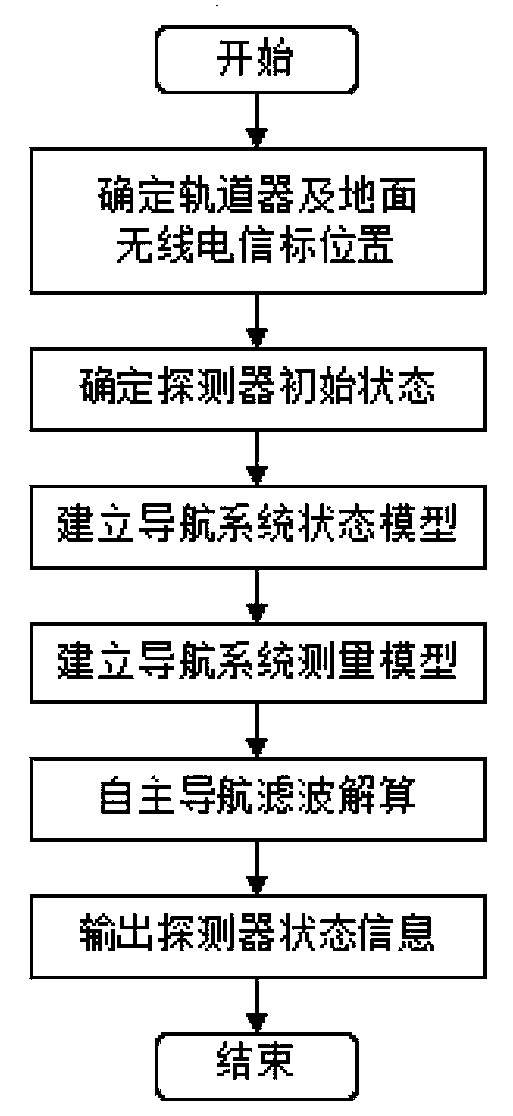
[0039] The specific implementation method of this example is as follows:
[0040] Step 1: Establishment of Mars entry segment state model
[0041] In the hypersonic entry stage, the probe is regarded as an uncontrolled flying particle, without considering the influence of strong winds and sandstorms on Mars, assuming that the atmosphere of Mars is stable, and ignoring the centripetal force and Coriolis effect cau...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More