

A ckf-based nonlinear asynchronous multi-sensor information fusion method
A multi-sensor, sensor technology, applied in instruments, special data processing applications, electrical and digital data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with specific embodiments.
[0034] (1) Fully preheat the multi-sensor system and collect the measurement information of each sensor i (k i ), where i=1, 2, ..., N (N is the number of sensors), k i is the sampling time of the i-th sensor.
[0035] (2) Establish the nonlinear state equation of the nonlinear asynchronous multi-sensor system and the measurement equation of each sensor.
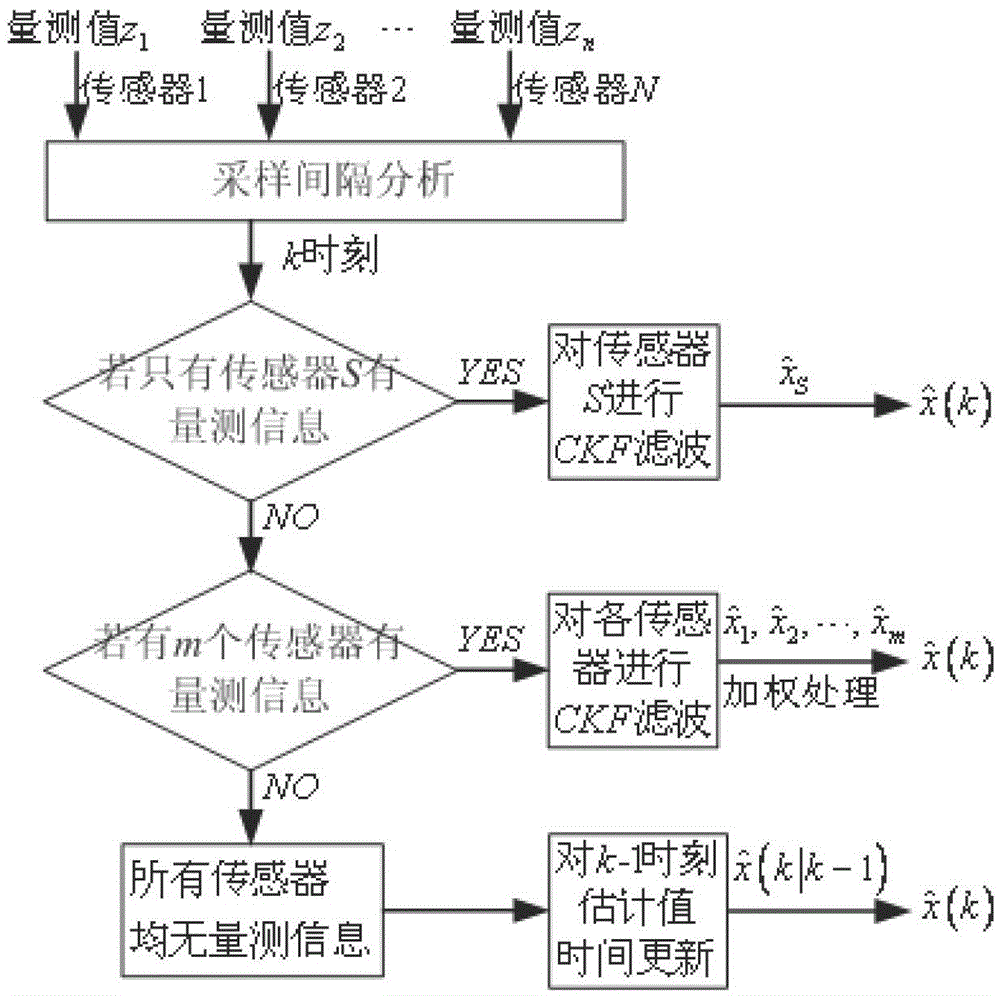
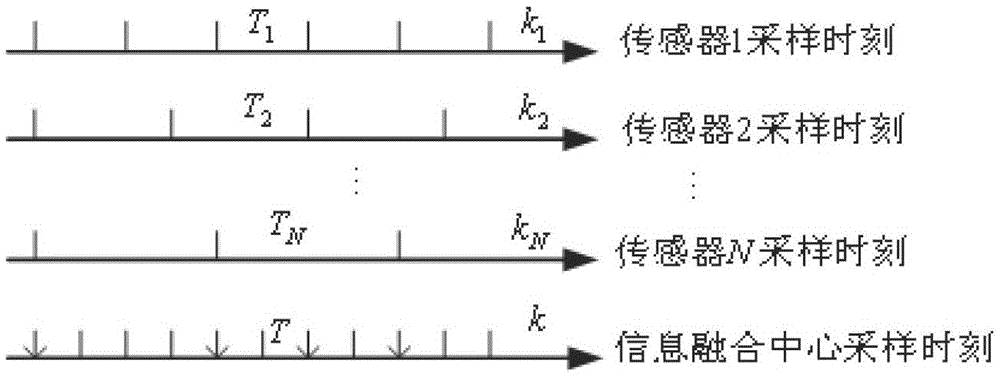
[0036] (3) Using the subdivision time slice method, the sampling interval of the fusion center is set as the highest precision time unit between sensors, that is, the maximum number that can be divisible by the sampling interval of each sensor at the same time is taken as the sampling interval of the fusion center.
[0037] Let the sampling time of any two sensors be T i ,T j (i, j=1, 2, ..., N, and i≠j), N is the total number of sensors. and have:
[0038]
[0039] Then the sampling interval of the fusion cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More