3-PRS (Prismatic-Revolute-Spherical) parallel robot positioning accuracy optimization method based on interval analysis
A 3-PRS, robot positioning technology, applied in the field of intelligent robots, can solve the problems of being trapped in local minima and difficult to select weights, etc., and achieve the effect of easy to master, strong practicability and universal applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
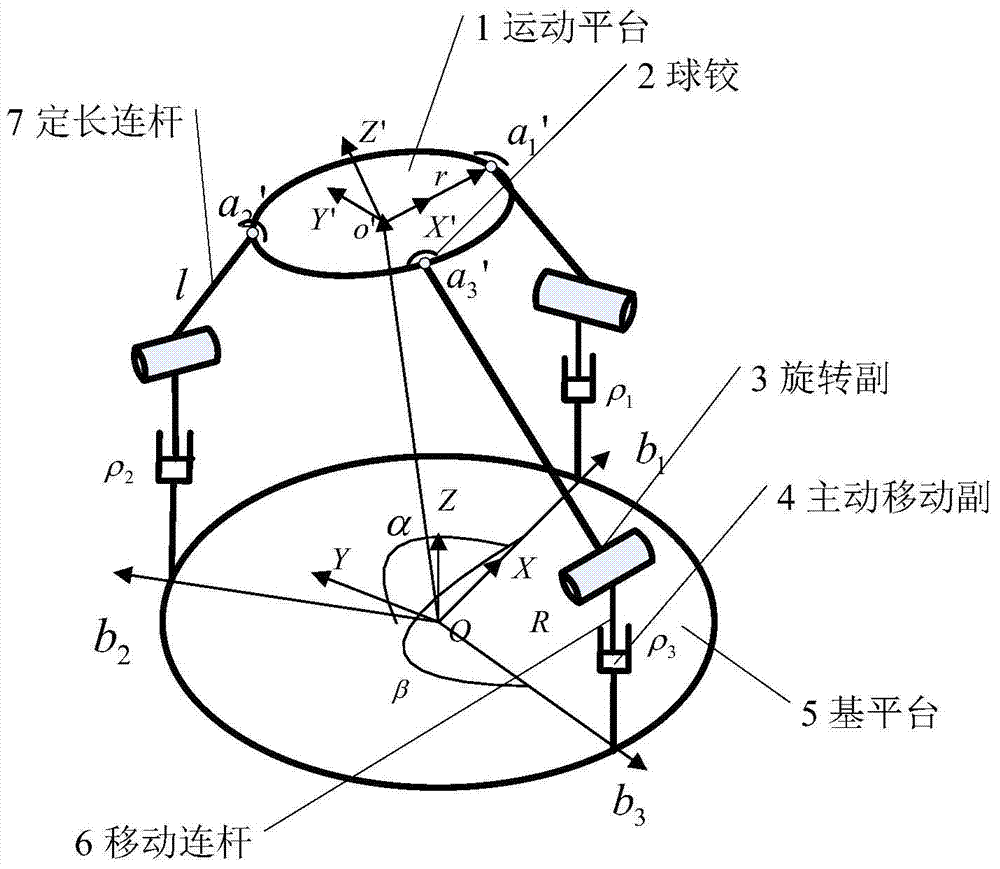
[0028] In order to describe the present invention in detail, first introduce the 3- P RS parallel robot and its independent and parasitic motion.
[0029] To determine the position of a rigid body in space, not only three position information, but also three other attitude information are required. Therefore, to fully express the information of a rigid body in space requires a six-dimensional vector. This means that six elements are required to fully determine the position and pose of the rigid body. In this way, the position and state information of the space rigid body can be represented. This is why a rigid body in space requires six degrees of freedom.
[0030] Similarly, for a space mechanism, such as a rod (rigid body), there is no constraint in space at all, then it can translate in three orthogonal directions, and can also rotate with three orthog...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com